
How to make rviz2 startup navigation automatically
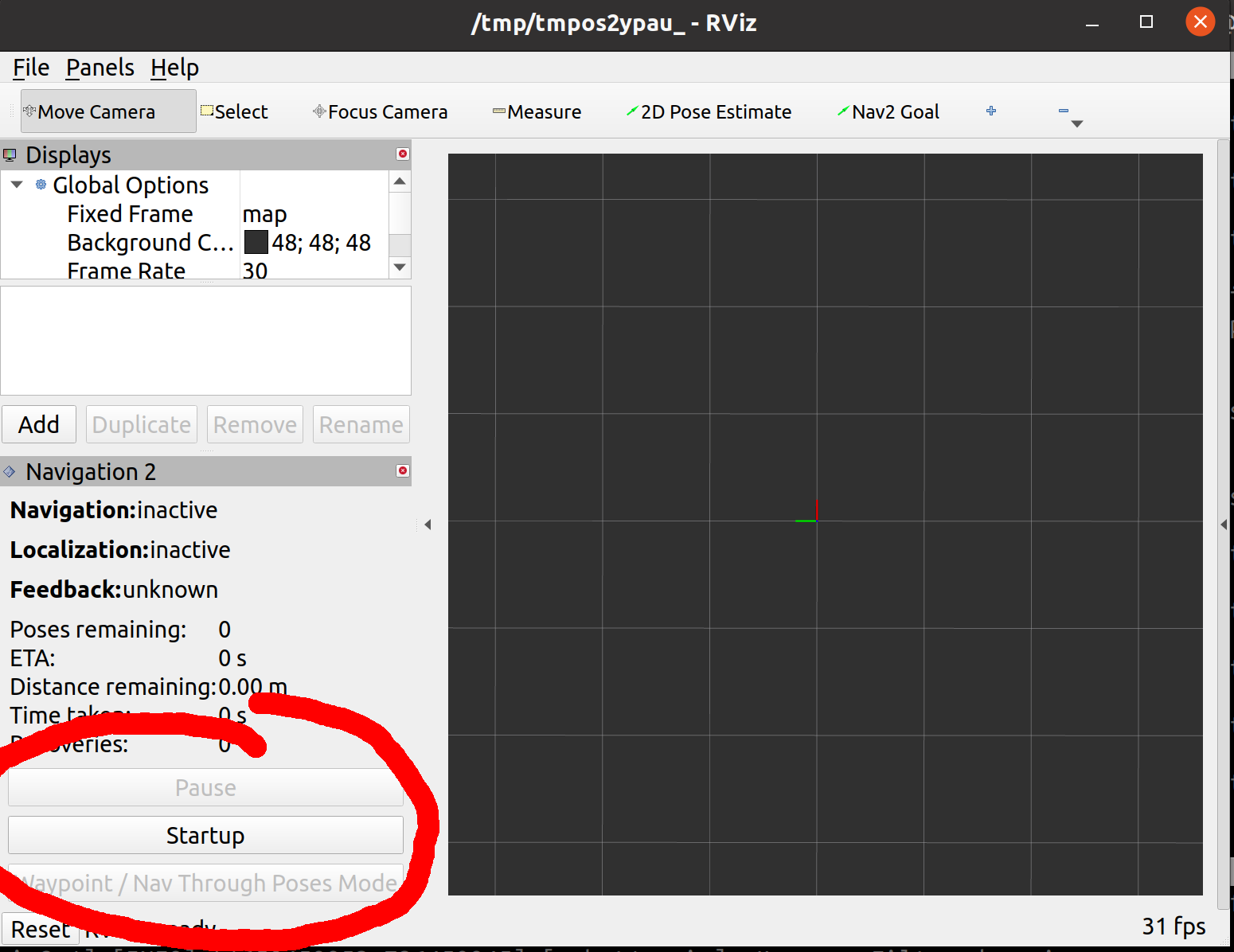
Hey, in my project, I open multiple instances of rviz2, one for each robot. Every time, I need to press the "Startup" button in Rviz for the map to show and I can publish an initial pose from a seperate script.
I want this to happen from the launch file and I thought the autostart launch parameter would do this, but it does not, or maybe I'm doing something wrong.
There also does not seem to be a difference in the .rviz configuration file after pressing startup.
Any ideas?
add a comment

