
navigation2 circle around in front of a wall
I'm using navigation2+ foxy+ turtlebot in a world. And when I tried to navigate the robot in front of a wall to the other side of the wall.
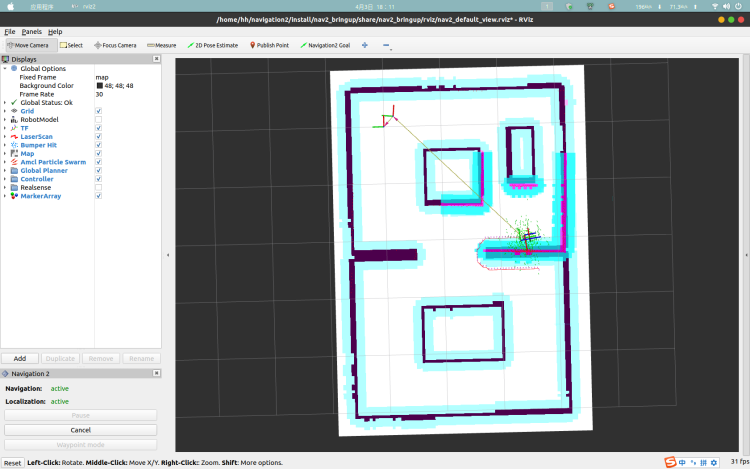
It just circle around. I set the global planner and local planner's params of infation radius as 0.15.(the initial param is 0.5). At last, the robot stop an report navigation succeeded.
Thank you very much for your effort!
add a comment
