
openPlanner can not avoid obstacles
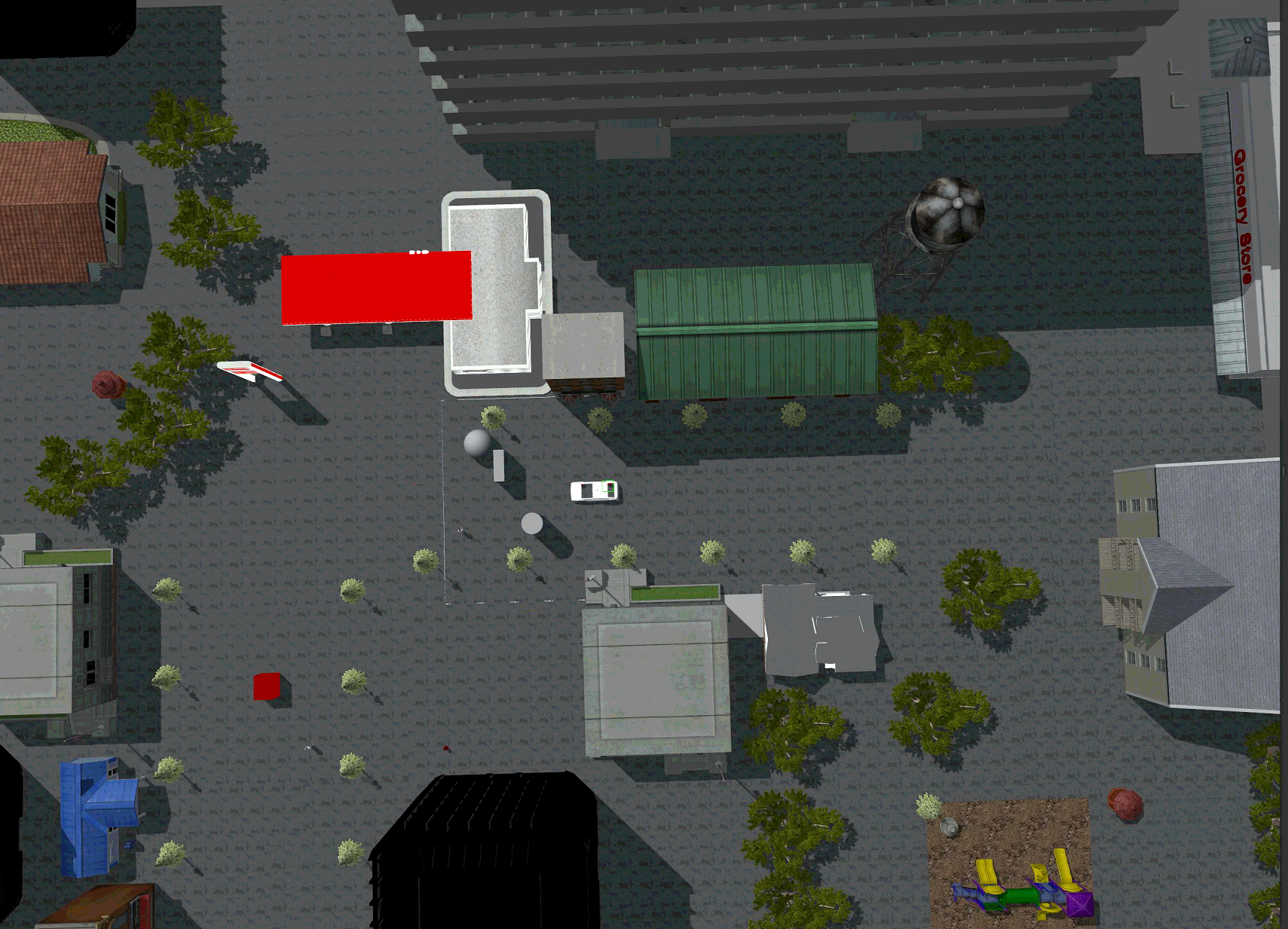
I set up several obstacles in the simulation environment and completed all preliminary preparations such as maping and locatilizing. The simulation environment is shown in Figure 1.
I wanted to verify the local path planning function of OP, but the planned local path did not show the obstacle avoidance function, as shown in Figure 2.
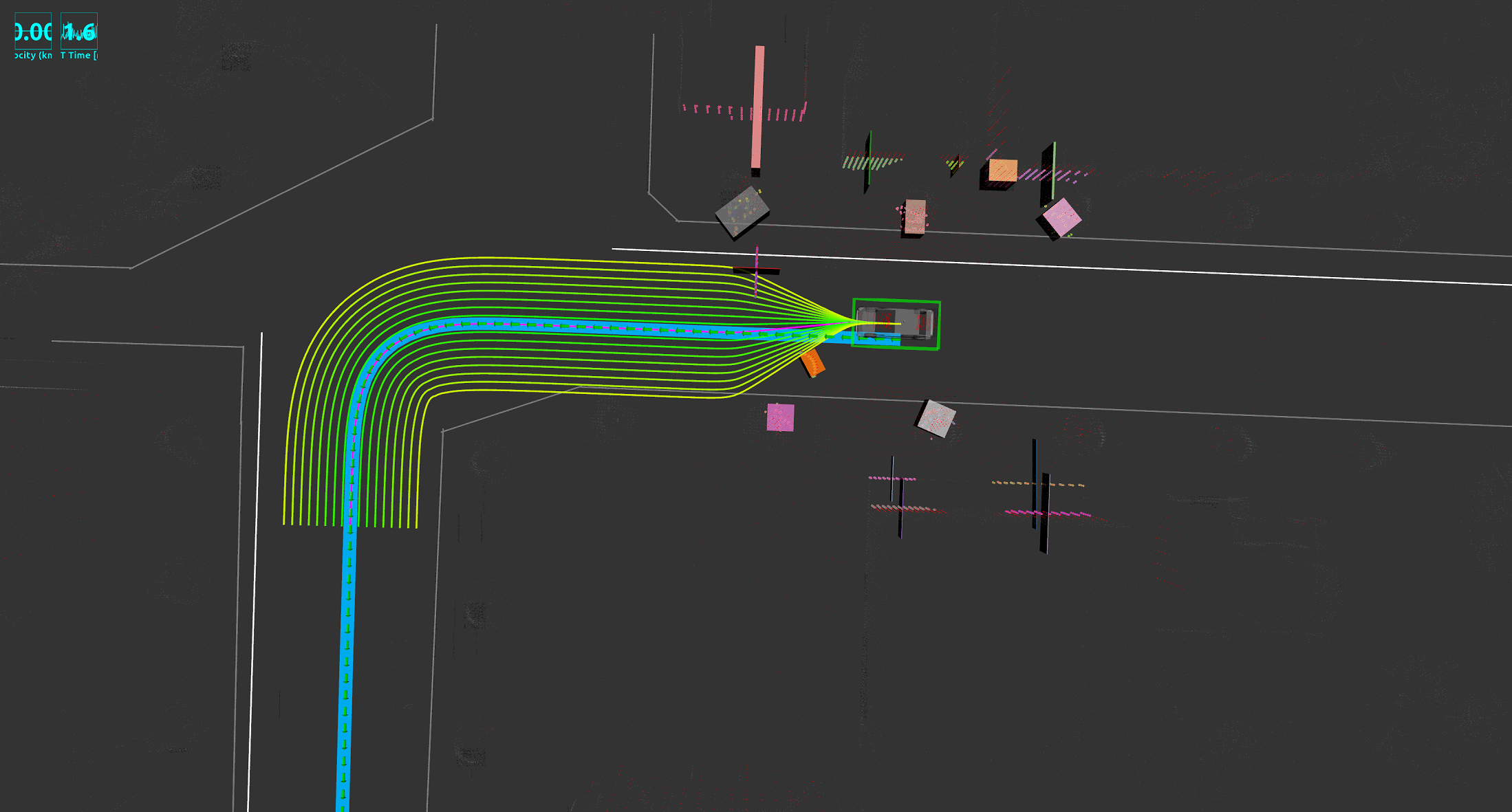
Even though there were obstacles, the path did not turn red. If I start the vehicle at this time, it will run directly into an obstacle.
I have checked the topic /tracked_objects published by node /lidar_kf_contour_track. It has the output of obstacles like:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
id: 0
label: ''
score: 0.0
color:
r: 0.0
g: 0.0
b: 0.0
a: 0.0
valid: False
space_frame: ''
pose:
position:
x: -0.733727872372
y: 5.61534357071
z: 1.81427035084
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
dimensions:
x: 1.74335861206
y: 1.6983089447
z: 1.46313762665
variance:
x: 0.0
y: 0.0
z: 0.0
velocity:
linear:
x: 0.00601311960223
y: -0.0132639864352
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
acceleration:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
pointcloud:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
height: 0
width: 0
fields: []
is_bigendian: False
point_step: 0
row_step: 0
data: []
is_dense: False
convex_hull:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
polygon:
points:
-
x: -0.128497362137
y: 5.73296022415
z: 1.81427037716
-
x: -0.0418645143509
y: 6.07044744492
z: 1.81427037716
-
x: -0.232710003853
y: 6.43886470795
z: 1.81427037716
-
x: -0.423555493355
y: 6.80728244781
z: 1.81427037716
-
x: -0.752950668335
y: 6.57465362549
z: 1.81427037716
-
x: -1.08234596252
y: 6.34202432632
z: 1.81427037716
-
x: -1.4117411375
y: 6.10939502716
z: 1.81427037716
-
x: -1.74113631248
y: 5.87676620483
z: 1.81427037716
-
x: -1.63342428207
y: 5.50282096863
z: 1.81427037716
-
x: -1.52571225166
y: 5.12887525558
z: 1.81427037716
-
x: -1.11913228035
y: 5.06570291519
z: 1.81427037716
-
x: -0.809655547142
y: 5.15245866776
z: 1.81427037716
-
x: -0.500178813934
y: 5.23921442032
z: 1.81427037716
-
x: -0.215130209923
y: 5.39547300339
z: 1.81427037716
candidate_trajectories:
id: 0
lanes: []
pose_reliable: False
velocity_reliable: True
acceleration_reliable: False
image_frame: ''
x: 0
y: 0
width: 0
height: 0
angle: 0.0
roi_image:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
height: 0
width: 0
encoding: ''
is_bigendian: 0
step: 0
data: []
indicator_state: 0
behavior_state: 0
user_defined_info: []
I hope someone can help me solve it, thank you!

which version and branch do you use, also make sure that op_predictor can receive the obstacle list from kf_contour_tracker and publish the obstacle list to op_trajectory_evaluator