
How to detect cliffs or steep descents as obstacles for autonomous navigation?

Hi, I am encountering a problem during the generation of an obstacle map to use in an autonomous navigation task. My robot has a stereo camera and uses the Rtabmap nodes to generate the map from the images.
The robot is not able to recognize a steep descent as obstacle and it falls into it. I tried to change the max_ground_angle parameter but this only change how some slopes are perceived, here instead the camera does not see the slope, but it should perceive that there is a place in which it can fall.
With the following images should be clearer what is the problem:
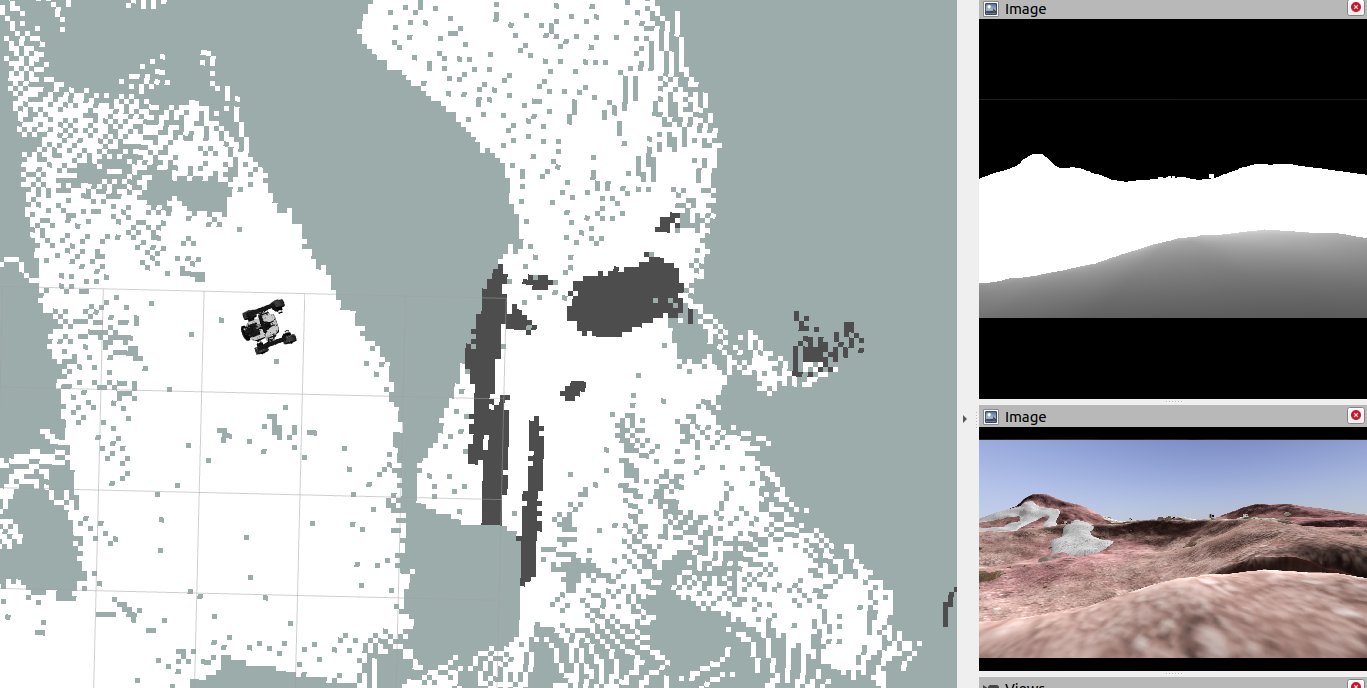
Notice how what should be an obstacle is not detected, so when the autonomous navigation is activated the robot goes straight into the cliff. The only obstacle that is detected it the wall on the other side.
Also from the depth image you can see how the depth change abruptly, this should tell to Rtabmap that there is a cliff.
On Gazebo this is the situation:

From here it's clear how this is a dangerous situation and the robot should stop.
In the launch file, I launch rtabmap using the following parameters, it's basically the same from the mapping tutorial:
<group ns="rtabmap">
<!-- Visual SLAM: args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="zed2_camera_center"/>
<param name="subscribe_stereo" type="bool" value="false"/>
<param name="subscribe_depth" type="bool" value="true"/>
<!-- <remap from="odom" to="/zed2/odom"/> -->
<remap from="odom" to="/odom"/>
<remap from="rgb/image" to="/zed2/right/image_rect_color"/>
<remap from="depth/image" to="/zed2/depth/depth_registered"/>
<remap from="rgb/camera_info" to="/zed2/depth/camera_info"/>
<param name="queue_size" type="int" value="30"/>
<param name="rgb_topic" type="string" value="/zed2/right/image_rect_color"/>
<param name="depth_topic" type="string" value="/zed2/depth/depth_registered"/>
<param name="camera_info_topic" type="string" value="/zed2/depth/camera_info"/>
<!-- Not used
<remap from="left/image_rect" to="/zed2/left/image_rect_color"/>
<remap from="right/image_rect" to="/zed2/right/image_rect_color"/>
<remap from="left/camera_info" to="/zed2/left/camera_info"/>
<remap from="right/camera_info" to="/zed2/right/camera_info"/> -->
<!-- RTAB-Map's parameters -->
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="Kp/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/> <!-- use SURF -->
<param name="Kp/NNStrategy" type="string" value="1"/> <!-- kdTree -->
<param name="SURF/HessianThreshold" type="string" value="1000"/>
<param name="Vis/MinInliers" type="string" value="10"/>
<param name="Vis/EstimationType" type="string" value="1"/> <!-- 3D->2D (PnP) -->
<param name="RGBD/LoopClosureReextractFeatures" type="string" value="true"/>
<param name="Vis/MaxWords" type="string" value="500"/>
<param name="Vis ...
