
ur5 based workcell not loading in rviz
Hi,
I am creating custom workcell urdf model for ur5 robotic arm based on the standard urdf file ur5.urdf.xacro that is available in the ur_description package of universal robots. My custom workcell xacro file digi2.xacro looks as follows. The idea is to add a table surface where ur5 is mounted on.
<?xml version="1.0" ?>
<robot name="ur5" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find ur_description)/urdf/ur5.urdf.xacro" />
<xacro:ur5_robot prefix="" joint_limited="true"/>
<link name="world"/>
<link name="table">
<visual>
<geometry>
<box size="2 1.5 0.05"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="2 1.5 0.05"/>
</geometry>
</collision>
</link>
<joint name="world_to_table" type="fixed">
<parent link="world"/>
<child link="table"/>
<origin xyz="0 0 1" rpy="0 0 0"/>
</joint>
<joint name="table_to_robot" type="fixed">
<parent link="table"/>
<child link="base_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
</robot>
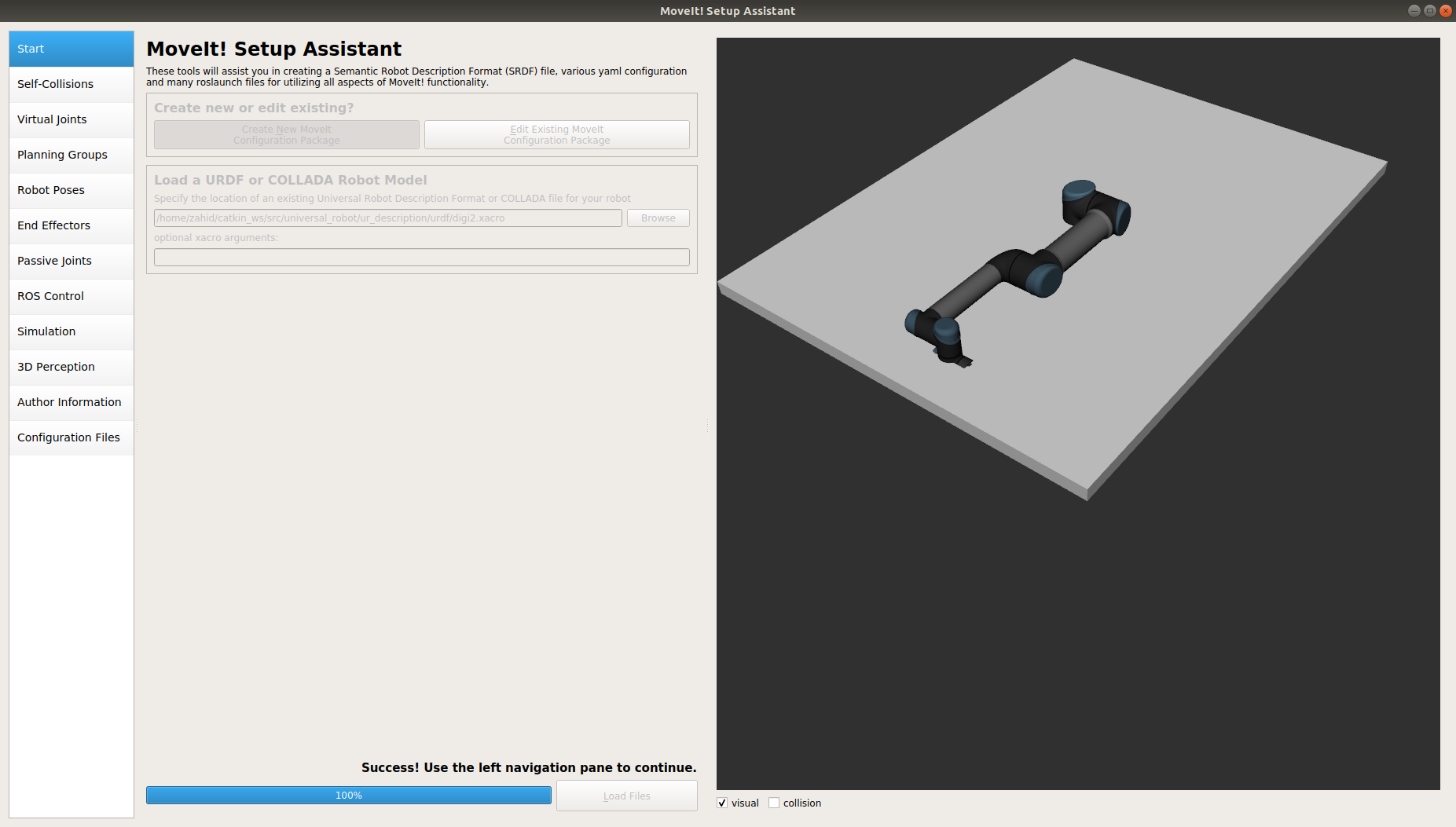
when I input digi2.xacro to the moveit setup assistant, it is correctly loaded as shown below:
When, MSA wizard completes, I can successfully compile my workspace and package that was created using the MSA.
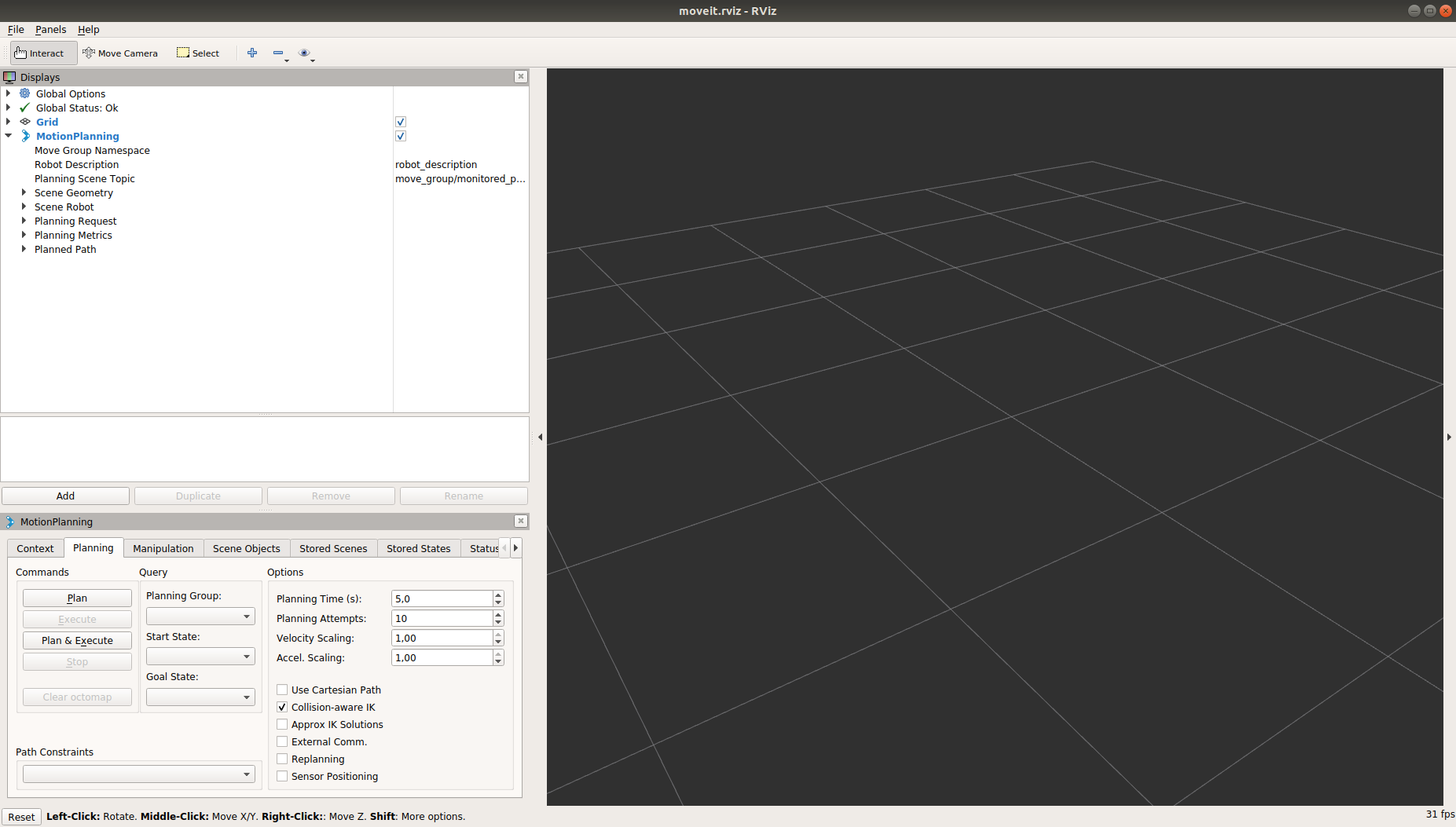
However when I run
roslaunch cth_pkg demo.launch
I get rviz with no workcell (ur5 or table surface visible) as shown below.
I see the following error on terminal.
[ERROR] [1644425995.588476488]: Exception caught while processing action 'loadRobotModel': Character [-] at element [45] is not valid in Graph Resource Name [/robot_description_planning/joint_limits/base-tool0_controller_floating_joint/trans_x/max_position]. Valid characters are a-z, A-Z, 0-9, / and _.
Based on the recommendations given in ur_modern_driver README.md file, This driver broadcasts a transformation between the base link and the end-effector as reported by the UR. The default frame names are: base and tool0_controller.
To use the tool0_controller frame in a URDF, there needs to be a link with that name connected to base. For example:
```
<!-- Connect tool0_controller to base using floating joint -->
<link name="tool0_controller"/>
<joint name="base-tool0_controller_floating_joint" type="floating">
<origin xyz="0 0 0" rpy="0 0 0"/>
<parent link=base"/>
<child link="tool0_controller"/>
</joint>
```
I had added the following
<link name="${prefix}tool0_controller"/>
<joint name="${prefix}base-tool0_controller_floating_joint" type="floating">
<origin xyz="0 0 0" rpy="0 0 0"/>
<parent link="${prefix}base"/>
<child link="${prefix}tool0_controller"/>
</joint>
to the end of ur5.urdf.xacro.
Why I am getting this error, and why is the model not loading correctly.
Please, any help or suggestions in this regards,
thanks,
Zahid
