
Problem in object detection and collision avoidance for warthog robot!
hi everyone,
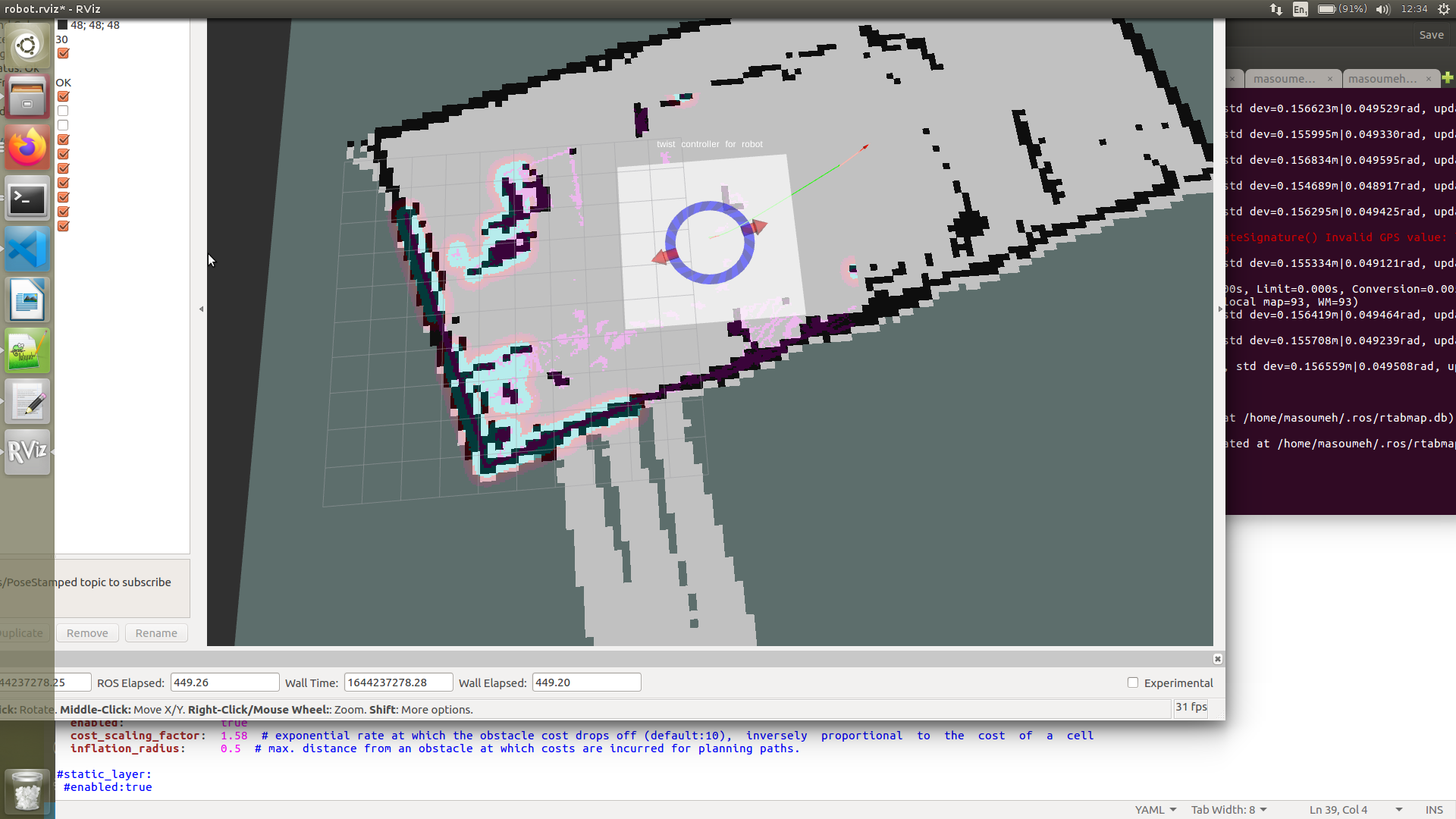
which parameters i need to define in move-base node (global, local costmaps and planners) to see the objects, for instance, 5 meters earlier, and starts detourin? because the size of ur robot is too big (warthog), and needs to make a decision before getting too close to the object.
What is the solution? i would be grateful if anybody can guide. thanks

You can read about parameter tuning for Navigation stack with
move_basethere: https://github.com/zkytony/ROSNavigat... Especially chapter4 Costmap Parameterswith4.1 footprintand4.2 inflation.@ljaniec thanks a lot, I used the document which you mentioned, it was good, now the problem is that it can detour the object, but it cannot get back to the global path and finish its mission. i mean after detouring the objects the robot puts a lot of pressure to turn and follow the global path to reach the goal, but fail!! what can i do?
one more question, I want that the robot react to the dynamic obstacles as well, i have activated rolling-window in global costmap as well, but it is not working properly! what should i do in this case?
thanks a lot
for the static object, it seems when i move the vehicle in the environment to identify the coordinate fo the goal, move-base should be launched as well. if i do not launch it, or close and open it again, it cannot detect the object in front of it anymore. why? sometimes i close move-node and make some changes to the parameters, and launch it again, but after closing it, it cannot specify the inflation rates around the static objects in front of it,why?