
How to change initial position of robot in outdoor navigation?

I want to navigate my robot in outdoor environment using gps. I have created 2 different ekf nodes. ekf_local is used to generate tf for odom->base_link and ekf_global generates tf for map->odom. I want to set initial position of robot in map frame. I tried set_pose_ekf but robot switches back to its default location i.e. map origin.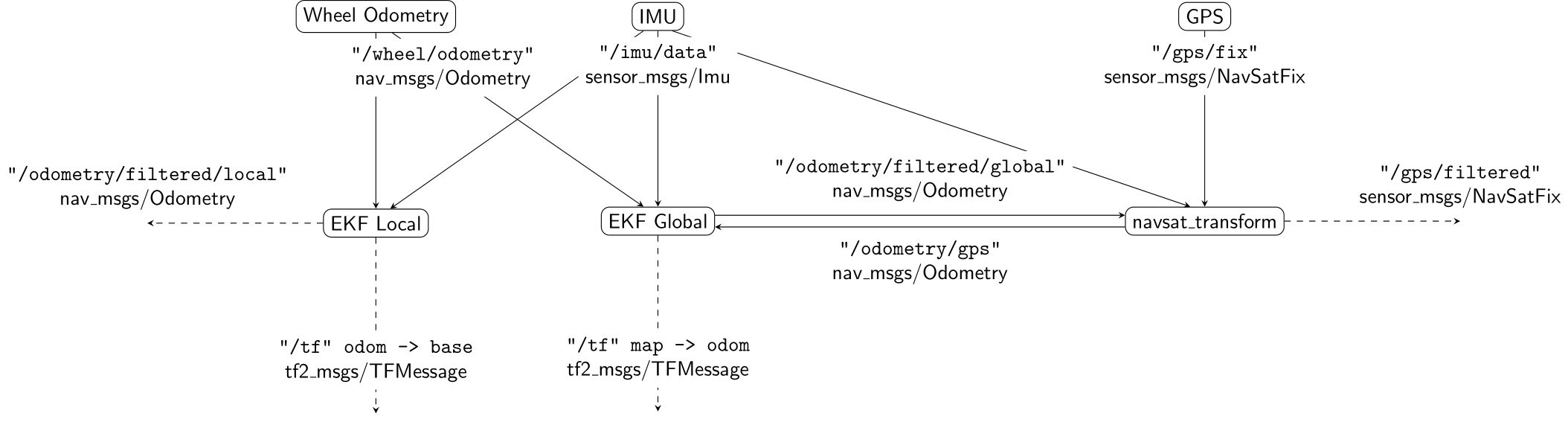
add a comment

