
nasat_transform , Wrong Robot position at start-up
I am using GPS with RTK for the localization
Due to hard winter conditions, I have made my the map with a Survey Android app. and transfered the data to a Geographic information system (QGIS).
I order to be compatible with the navsat_transform. I have used the WGS94 to UTM19N projection in QGIS. I have then Exported the result of my survey as a scaled .pgm file. ( In this format the north is up and has has no declination)
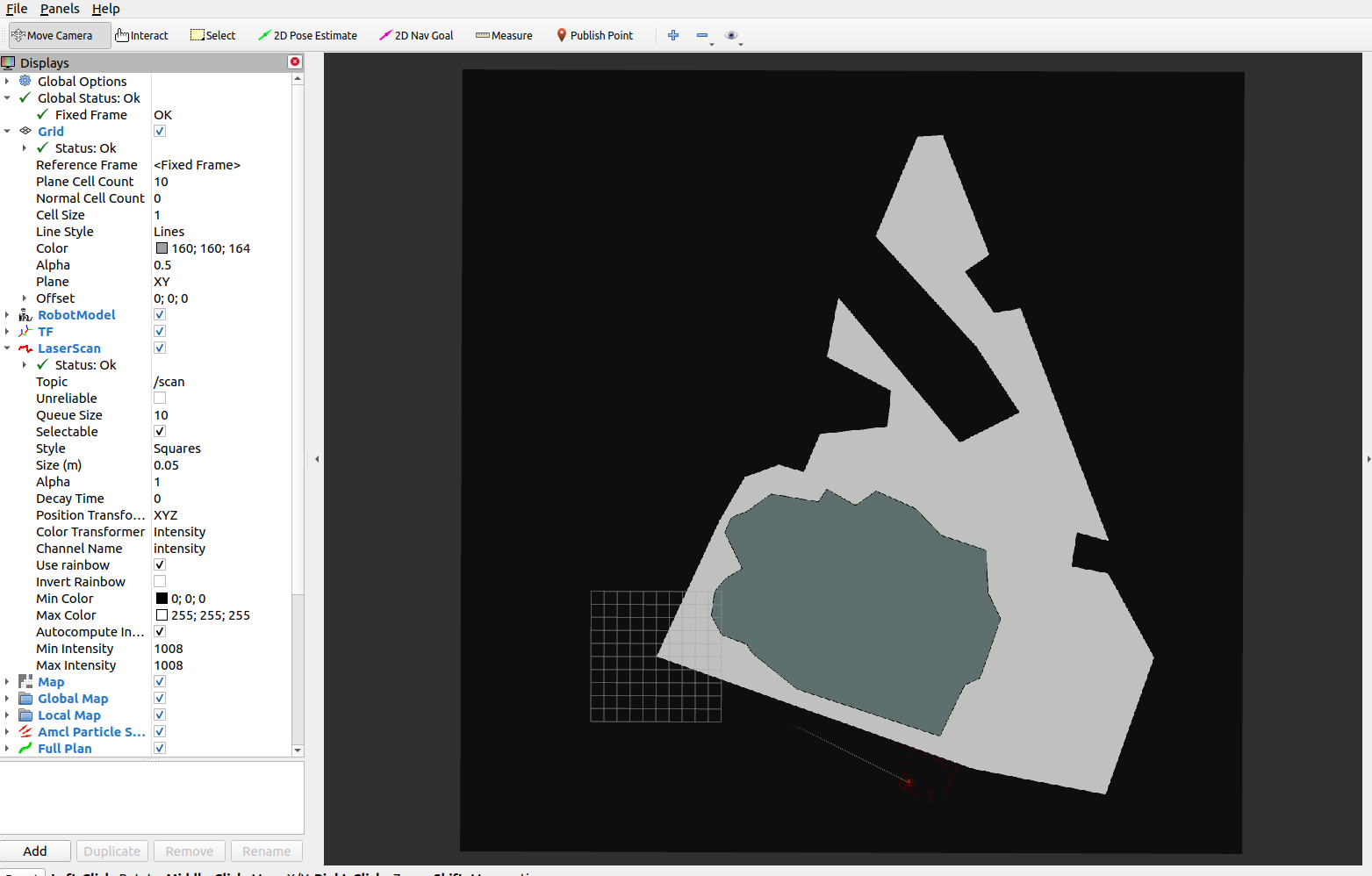
When i launch robot_localization my_dual_ekf_navsat_example.launch with my local declination of 15 deg West (+0.309621409303794 rad). My outdoor fixed antenna ( witch act temporarily as my robot ) appear outside the boundaries of my survey.
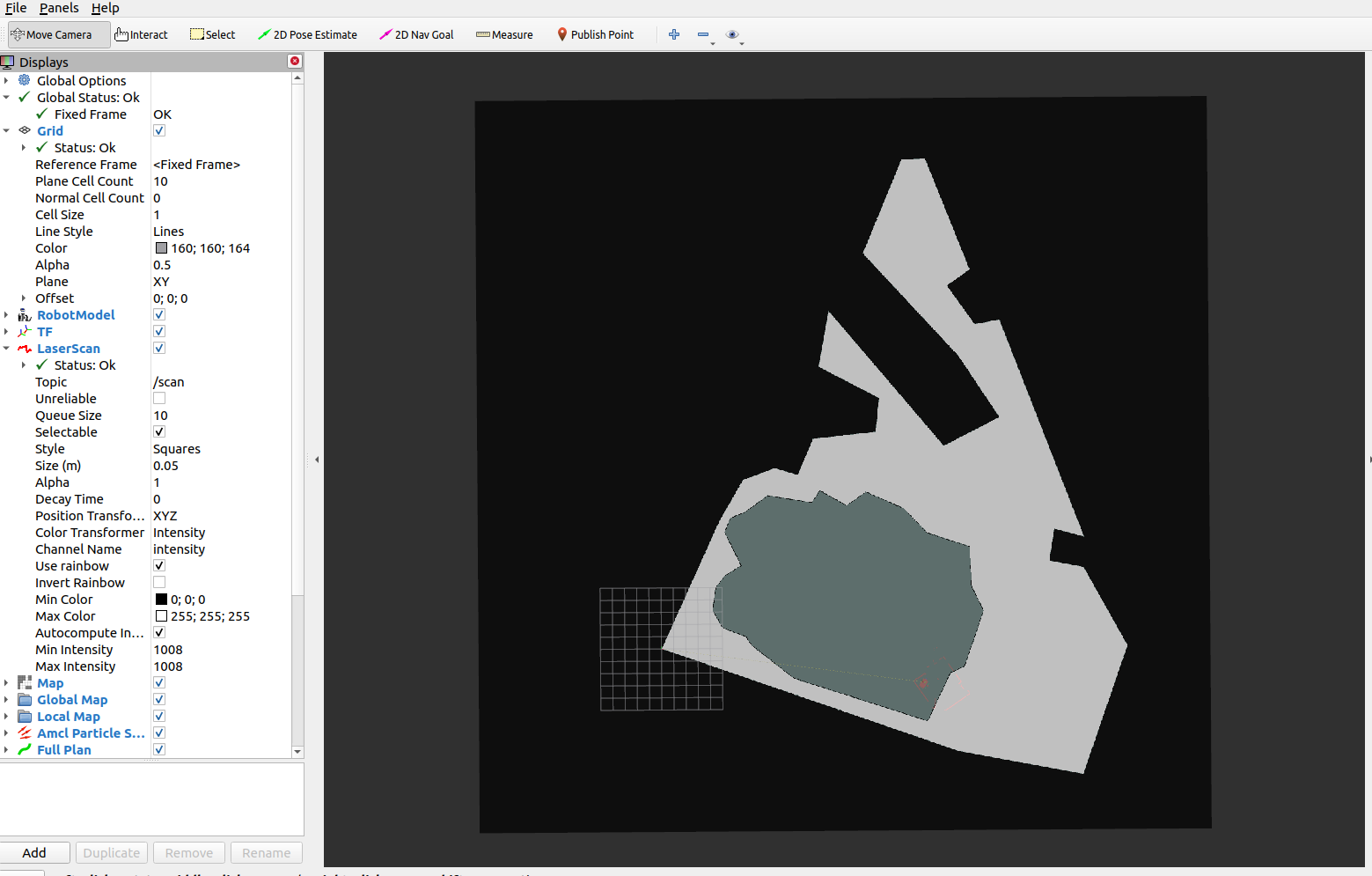
If i remove the declination in my dual_ekf_navsat_example.yaml file. My antenna is at the required location.
If i leave the yaml_file without declination. Will it generate operation problem with a real moving robot ?
An other solution would be to rotate the map.
But one way or another i think that i am introducing false information in my control logic.
Am I miss understanding something ?
Which is the best thing to do and what problems will i have to mitigate ?
