
Robot Parsing looks weired!

After updating ros packages, I'm getting a weird parsing of the robot as you can see here:
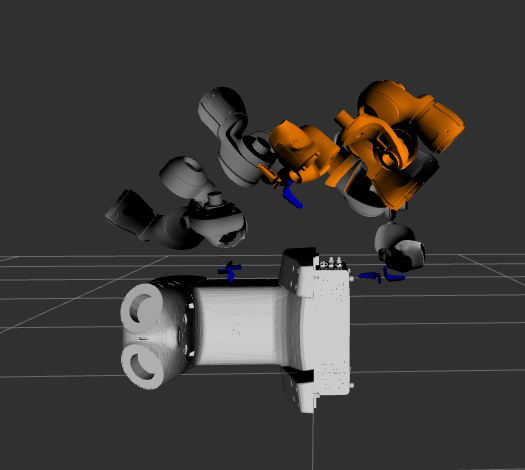
I'm using these settings for MoveIt and the Robot description, which has worked perfectly before! I'm not sure what is the cause of this problem!
Can you please tell me what is the cause of such wrong parsing usually?
Here is my launch file:
<launch>
<!-- The planning and execution components of MoveIt! configured to run -->
<!-- using the ROS-Industrial interface. -->
<!-- Non-standard joint names:
- Create a file [robot_moveit_config]/config/joint_names.yaml
controller_joint_names: [joint_1, joint_2, ... joint_N]
- Update with joint names for your robot (in order expected by rbt controller)
- and uncomment the following line: -->
<!-- <rosparam command="load" file="$(find yumi_moveit_config)/config/joint_names.yaml"/> -->
<!-- the "sim" argument controls whether we connect to a Simulated or Real robot -->
<!-- - if sim=false, a robot_ip argument is required -->
<arg name="sim" default="false" doc="Use industrial robot simulator instead of real robot" />
<arg name="robot_ip" unless="$(arg sim)" value="192.168.125.1" doc="IP of controller (only required if not using industrial simulator)" />
<!-- By default, we do not start a database (it can be large) -->
<arg name="db" default="false" doc="Start the MoveIt database" />
<!-- Allow user to specify database location -->
<arg name="db_path" default="$(find yumi_moveit_config)/default_warehouse_mongo_db" doc="Path to database files" />
<!-- load the robot_description parameter before launching ROS-I nodes -->
<include file="$(find yumi_moveit_config)/launch/planning_context.launch" >
<arg name="load_robot_description" value="true" />
</include>
<!-- run the robot simulator and action interface nodes -->
<group if="$(arg sim)">
<include file="$(find industrial_robot_simulator)/launch/robot_interface_simulator.launch" />
</group>
<!-- run the "real robot" interface nodes -->
<!-- - this typically includes: robot_state, motion_interface, and joint_trajectory_action nodes -->
<!-- - replace these calls with appropriate robot-specific calls or launch files -->
<group unless="$(arg sim)">
<include file="$(find abb_robot_bringup_examples)/launch/ex3_rws_and_egm_yumi_robot.launch" >
<arg name="robot_ip" value="$(arg robot_ip)"/>
</include>
</group>
<!-- , "/yumi/gripper_states" -->
<!-- Joint state and robot state publisher calls -->
<node name="yumi_joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
<rosparam param="source_list">["/yumi/rws/joint_states"]</rosparam>
</node>
<!-- publish the robot state (tf transforms) -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<include file="$(find yumi_moveit_config)/launch/move_group.launch">
<arg name="publish_monitored_planning_scene" value="true" />
<!-- <arg name="pipeline" value="chomp" /> -->
</include>
<include file="$(find yumi_moveit_config)/launch/moveit_rviz.launch">
<arg name="config" value="true"/>
</include>
<!-- If database loading was enabled, start mongodb as well -->
<include file="$(find yumi_moveit_config)/launch/default_warehouse_db.launch" if="$(arg db)">
<arg name="moveit_warehouse_database_path" value="$(arg db_path)"/>
</include>
</launch>

What is your MoveIt version as you mentioned you recently made an update?
@osilva restarting the device after the update has solved the problem!
Great to hear!