
Gmapping mark footprint on map
Hi everyone, I'm using gmapping for building maps in my office. Every seems fine but except when I follow the robot to build maps, my footprint is marked on the the map, it looks like this:

And this
So when I run move_base, these footprints is marked as obstacles due to the static layer and the inflation layer plugins in my global_costmap, it looks like this:
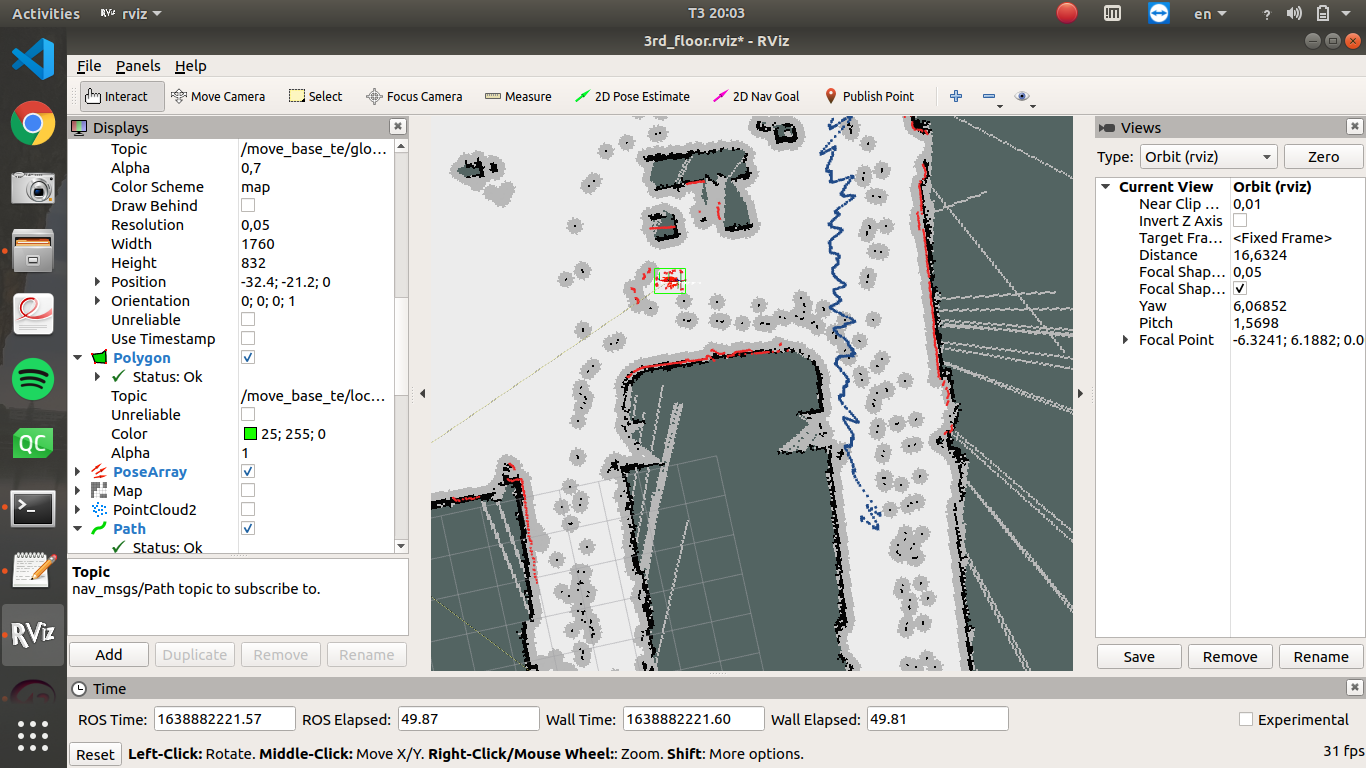
These footprint-obstacles prevent the global_planner to produce path over them, while there are actually no obstacles. How can I resolve this problem? Anyone has experiment on this? Please give me some advice. Below are my gmapping parameters:
map_update_interval: 0.5
maxUrange: 10.0
sigma: 0.05
kernelSize: 1
lstep: 0.01
astep: 0.01
iterations: 5
lsigma: 0.075
ogain: 3.0
lskip: 0.0
minimumScore: 50
srr: 0.1
srt: 0.05
str: 0.05
stt: 0.1
linearUpdate: 0.1
angularUpdate: 0.1
temporalUpdate: 0.5
resampleThreshold: 0.5
particles: 30
xmin: -10.0
ymin: -10.0
xmax: 10.0
ymax: 10.0
delta: 0.05
llsamplerange: 0.01
llsamplestep: 0.01
lasamplerange: 0.005
lasamplestep: 0.005
maxRange: 25.0
base_frame : "base_link"
map_frame : "map"
odom_frame : "odom"
Thank you all!
add a comment
