
how to specify yaw-offset and magnetic declination radiance in robot_localization package???

hi
I want to know the meaning of yaw-offset! I want to use robot-localization pkg and I need to identify yaw-offset and magnetic declination radiance, I have checked robot-localization ros wiki, but I cannot understand what does the parameter w (omega), mean in the following formula: http://docs.ros.org/en/melodic/api/ro...
yaw-imu=−ω−offsetyaw+θ
θ=yaw-imu+ω+offsetyaw
jwould you please guide me, how can i specify yaw-offset and magnetic declination radiance. The IMU model is gx5-25 which provides orientation in quaternion format, angular acceleration and linear velocity.
@tom Moore , would you please help me to find the correct solution?
Kind Regards

Does anybody have any idea about this question?
@tom Moore Would you please help me to find the answer of this question?
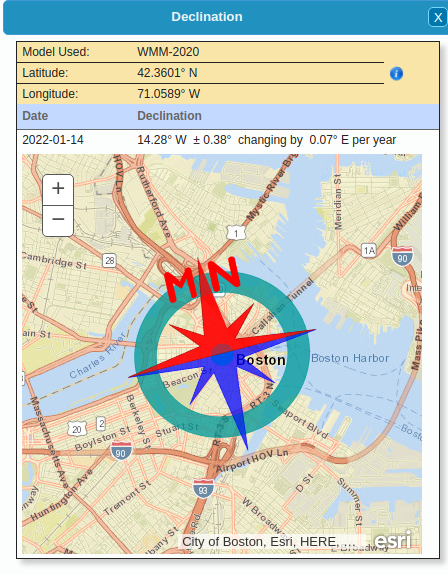
I found out that magnetic declination radiance can be calculated from: https://www.ngdc.noaa.gov/geomag/calc... But what about YAW-OFFSET, I really need to know how to calculate/ specify that!? Do we need to calculate these two parameters for each new environment that we want to do the test? thanks
in the robot-loccalization ros wiki, it is mentioned that if IMU faces east, the heading should report 0. How can i find out that the heading shows 0?? Should I use any other tools? or from the imu output, i can identify? Would you please help me to find the solution?
Hi,
I have a followup question, didn't know if I can post it here but just to avoid confusion, I made a separate question, would really appreciate if I could get some guidance