
Navigation2:[navfn_planner] Original error: GetCostmap service client: async_send_request failed
ROS version: Dashing
I've launched the navigation2 on the physical robot
After I set the initial pose, both navfn_planner and map_server show some error
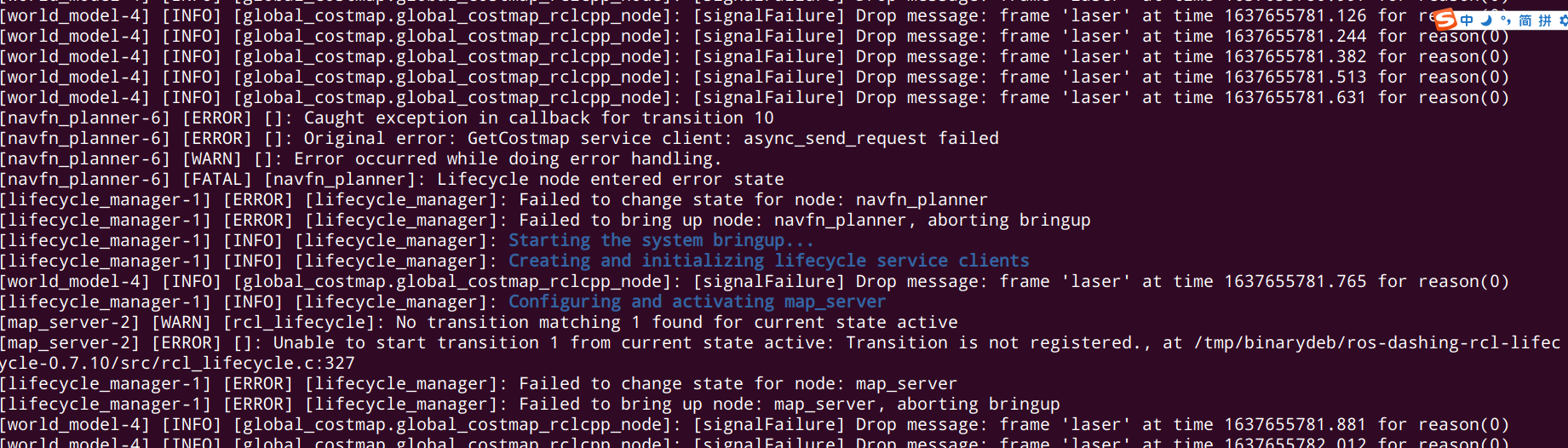
[navfn_planner-6] [ERROR] []: Caught exception in callback for transition 10
[navfn_planner-6] [ERROR] []: Original error: GetCostmap service client: async_send_request failed
[navfn_planner-6] [WARN] []: Error occurred while doing error handling.
[navfn_planner-6] [FATAL] [navfn_planner]: Lifecycle node entered error state
[lifecycle_manager-1] [ERROR] [lifecycle_manager]: Failed to change state for node: navfn_planner
[lifecycle_manager-1] [ERROR] [lifecycle_manager]: Failed to bring up node: navfn_planner, aborting bringup
[lifecycle_manager-1] [INFO] [lifecycle_manager]: Starting the system bringup...
[lifecycle_manager-1] [INFO] [lifecycle_manager]: Creating and initializing lifecycle service clients
[world_model-4] [INFO] [global_costmap.global_costmap_rclcpp_node]: [signalFailure] Drop message: frame 'laser' at time 1637655781.765 for reason(0)
[lifecycle_manager-1] [INFO] [lifecycle_manager]: Configuring and activating map_server
[map_server-2] [WARN] [rcl_lifecycle]: No transition matching 1 found for current state active
[map_server-2] [ERROR] []: Unable to start transition 1 from current state active: Transition is not registered., at /tmp/binarydeb/ros-dashing-rcl-lifecycle-0.7.10/src/rcl_lifecycle.c:327
[lifecycle_manager-1] [ERROR] [lifecycle_manager]: Failed to change state for node: map_server
[lifecycle_manager-1] [ERROR] [lifecycle_manager]: Failed to bring up node: map_server, aborting bringup
And I have no idea what is going on
Here is my config file
amcl:
ros__parameters:
use_sim_time: false
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "differential"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
amcl_map_client:
ros__parameters:
use_sim_time: false
amcl_rclcpp_node:
ros__parameters:
use_sim_time: false
bt_navigator:
ros__parameters:
use_sim_time: false
bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
dwb_controller:
ros__parameters:
use_sim_time: false
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.26
max_vel_y: 0.0
max_vel_theta: 1.0
min_speed_xy: 0.0
max_speed_xy: 0.26
min_speed_theta: 0.0
min_x_velocity_threshold: 0.001
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 5
vtheta_samples: 20
sim_time: 1.7
linear_granularity: 0.05
xy_goal_tolerance: 0.25
transform_tolerance: 0.2
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 0.0
GoalAlign.scale: 0.0
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
local_costmap:
local_costmap:
ros__parameters:
use_sim_time: false
global_frame: odom
plugin_names: ["obstacle_layer", "inflation_layer"]
plugin_types: ["nav2_costmap_2d::ObstacleLayer", "nav2_costmap_2d::InflationLayer"]
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.105
inflation_layer.cost_scaling_factor: 3.0
obstacle_layer:
enabled: True
always_send_full_costmap: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
local_costmap_client:
ros__parameters:
use_sim_time: false
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: false
global_costmap:
global_costmap:
ros__parameters:
use_sim_time: false
robot_radius: 0.105
obstacle_layer:
enabled: True
always_send_full_costmap: True
observation_sources: scan ...add a comment

