
gazebo ros control not working for large urdf

When i test the gazebo ros control plugin with diff drive ros controller in small urdf the robot is moving properly when sending the twist command. But when i use the large urdf i.e full body of robot with same confirugration robot is not moving neither any error or warning msg is comming.
here the screenshot of full robot:
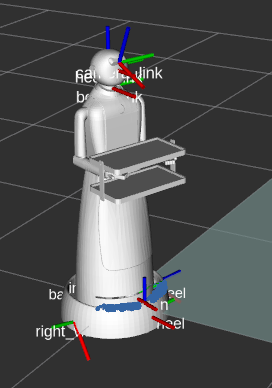
When only base is used by removing the upper parts the ros controllers are working like charm. How should i debug gor resolve this issue, since the issue could be also related to ros_controllers i.e diff drive controller.
add a comment
