
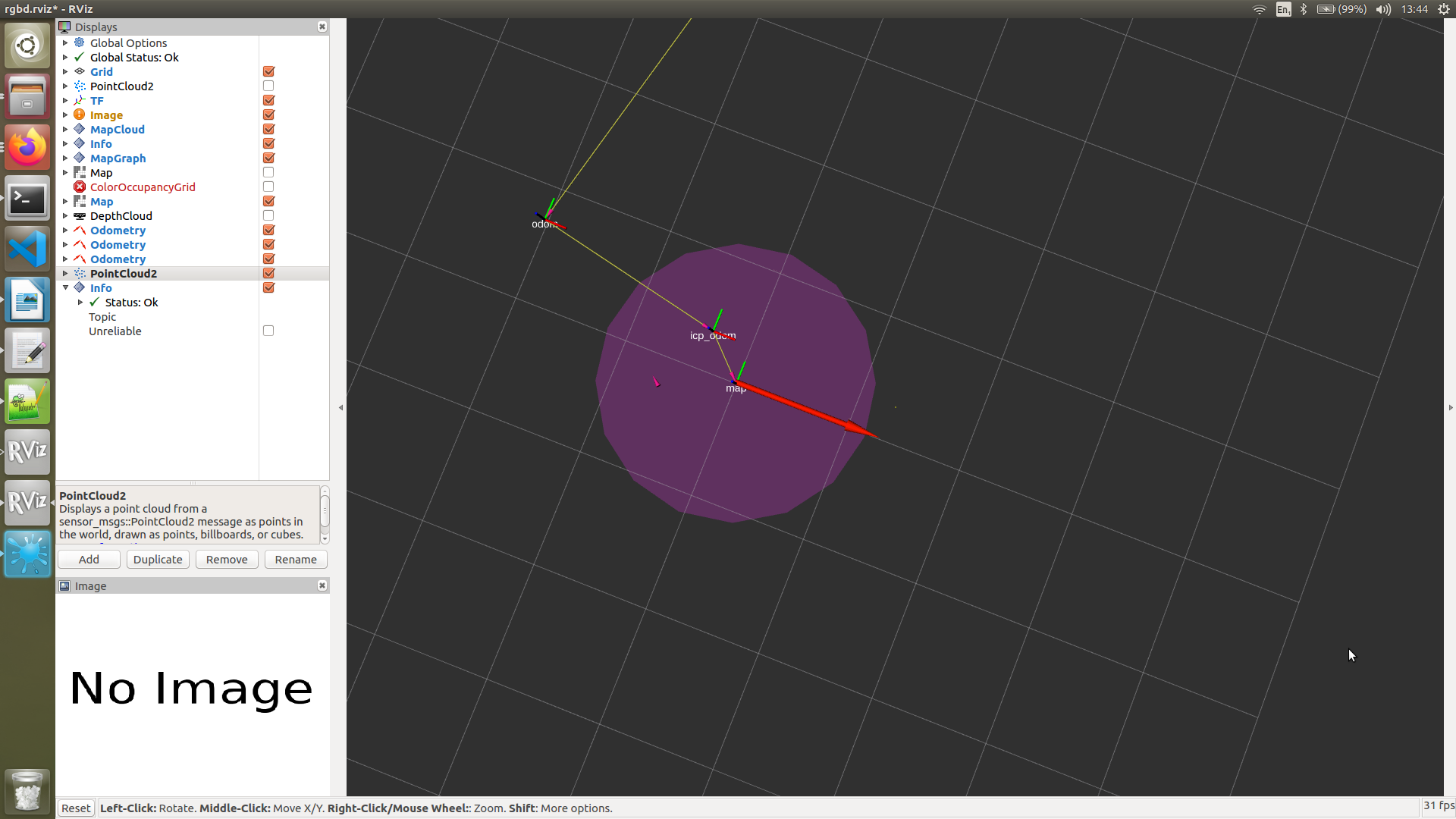
map is separated from its frame
hi
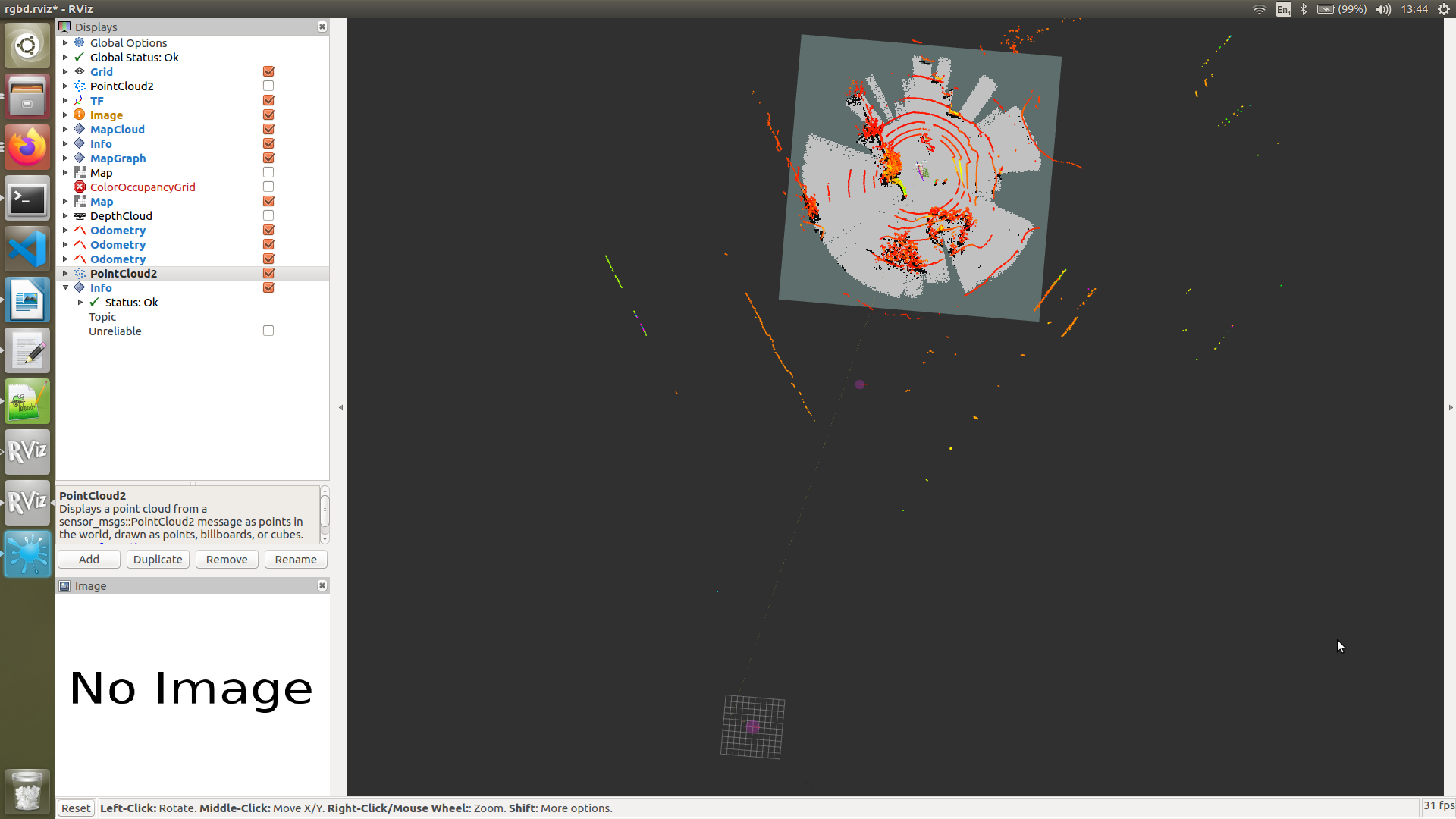
I have used rtabmap as map provider and two instances of robot-localization as odom frame and map frame provider. but when I run a bag file, i can see that map is far from the map frame, while we expect that map frame be in the map! what should i do?
I have also provided the ekf-global as well.:
For parameter descriptions, please refer to the template parameter files for each node.
ekf_se_map:
frequency: 50
sensor_timeout: 0.1
two_d_mode: true
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
map_frame: map
odom_frame: icp_odom
base_link_frame: base_link
world_frame: map
# -------------------------------------
# Wheel odometry:
odom0: /warthog_velocity_controller/odom
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
odom0_queue_size: 10
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
# -------------------------------------
# GPS odometry:
odom1: /outdoor_waypoint_nav/odometry/gps
odom1_config: [true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom1_queue_size: 10
odom1_nodelay: true
odom1_differential: false
odom1_relative: false
# -------------------------------------
# Lidar odometry:
# velocity from odometry
odom2: /rtabmap/odom
odom2_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
odom2_queue_size: 10
odom2_nodelay: true
odom2_differential: true
odom2_relative: false
#..................................................
#Localization_Pose
pose0: /rtabmap/localization_pose
pose0_config: [true, true, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]
pose0_queue_size: 10
pose0_differential: false
pose0_relative: false
# --------------------------------------
# imu configure:
imu0: /gx5/imu/data
imu0_config: [false, false, false,
false, false, false,
false, false, false,
false, false, true,
true, true, false]
imu0_nodelay: true
imu0_differential: false
imu0_relative: false
imu0_queue_size: 10
imu0_remove_gravitational_acceleration: true
use_control: false
process_noise_covariance: [1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3]
initial_estimate_covariance: [1.0, 0, 0, 0, 0, 0, 0, 0 ...add a comment
