Is it possible to get rgb from camera and depth from the lidar for loop closure detection?

hi.
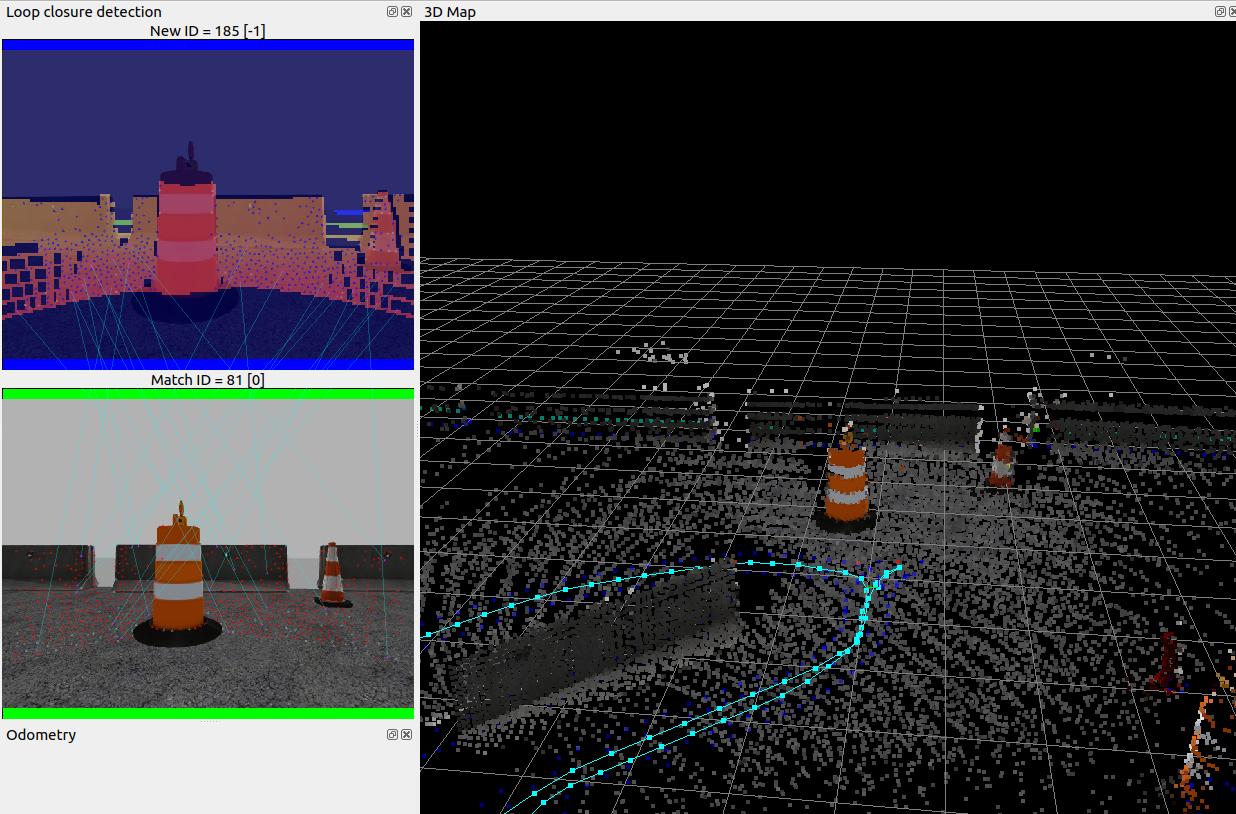
i have a number of sensors already (3d-lidar, imu, wheel odometer), now i want to use an RGB camera as well. the rgb part of the camera (ASUS model) is ok but its depth is so poor outside. so is it possible to receive rgb from the camera nad the depth from 3d laidar?
I want to have a loop clousre so i need to have a camera.
kind regards
add a comment