
ur_calibration results in different robot pose in ROS than in reallity
Hi ROS community. I've already asked this question here , however no answer was arrived therefore i'm trying to ask here the same thing.
I'm using an UR5 robot with the official ROS wrapper. The setup is straightforward, i'm able to communicate with the robot, send follow_joint_trajectory goals and move the real robot from ROS, but ONLY IF i skip the ur_calibation step (see the link).
If i execute the calibration, then basically the outcome is that robot has totally different pose in ROS than in reallity, i.e., if i check the robot in RViZ i see a totally different pose (joint configuration) then the real robot has in front of me.
Did anyone face this kind of problem? I summarize below the steps i executed.
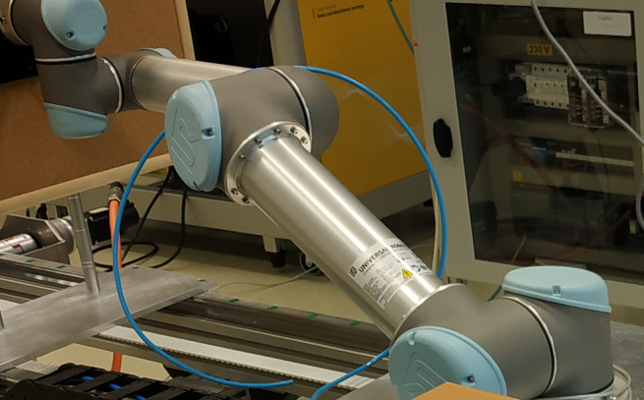
1.The robot pose in reallity is the following:


2.I launch the calibation extraction with the launch file:
roslaunch ur_calibration calibration_correction.launch \robot_ip:=192.168.1.81 \target_filename:="$(rospack find example_organization_ur_launch)/etc/ex-ur5-1_calibration.yaml"
and i get a nice calibration yaml file:
kinematics:
shoulder:
x: 0
y: 0
z: 0.08948760745641905
roll: -0
pitch: 0
yaw: 5.724267271354014e-05
upper_arm:
x: 4.767387894761116e-05
y: 0
z: 0
roll: 1.569913581252249
pitch: 0
yaw: 2.121784526601501e-05
forearm:
x: -0.4254051262210206
y: 0
z: 0
roll: 3.141571256638476
pitch: 3.139609714587363
yaw: 9.181814845231772e-05
wrist_1:
x: -0.392460380822819
y: -0.002312531082237207
z: 0.1097805113913582
roll: 0.02106192704769751
pitch: -0.001508302033929348
yaw: 3.141509032753284
wrist_2:
x: 7.021751572921595e-05
y: -0.09475180859812876
z: -0.0003085072123167084
roll: 1.574052265934258
pitch: 0
yaw: -3.378771318114996e-05
wrist_3:
x: -4.120584958757715e-05
y: 0.0824868794107365
z: -0.0002106126115580783
roll: 1.568243046135182
pitch: 3.141592653589793
yaw: -3.141583455241135
hash: calib_2261225183801150179
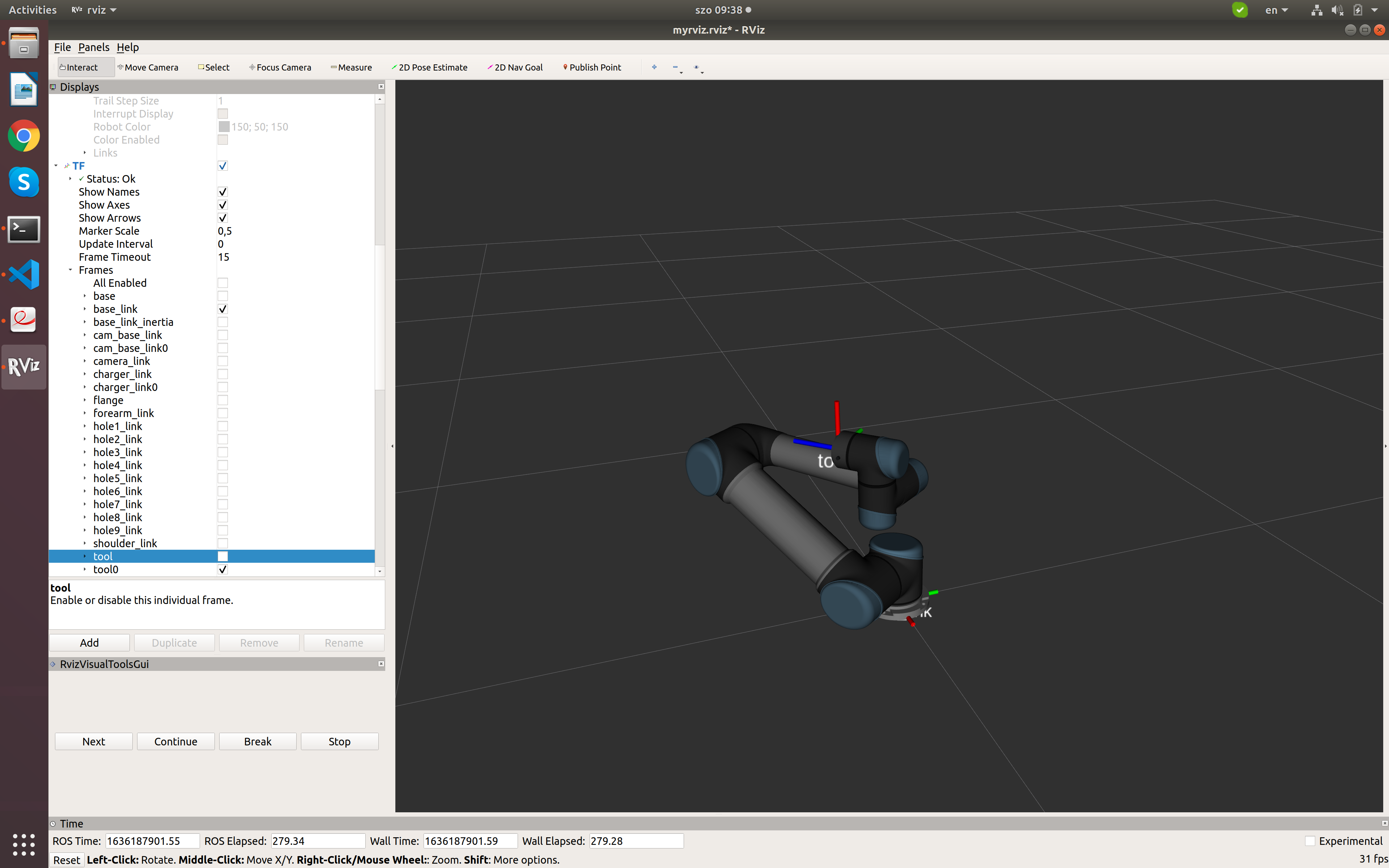
3.Then, I bringup the ur5 with it’s launch file and the aforementioned kinematics yaml file. Then RVIZ shows a totally different robot pose than the configuration the robot has in reallity, however the joint angles are the same as on the TP. 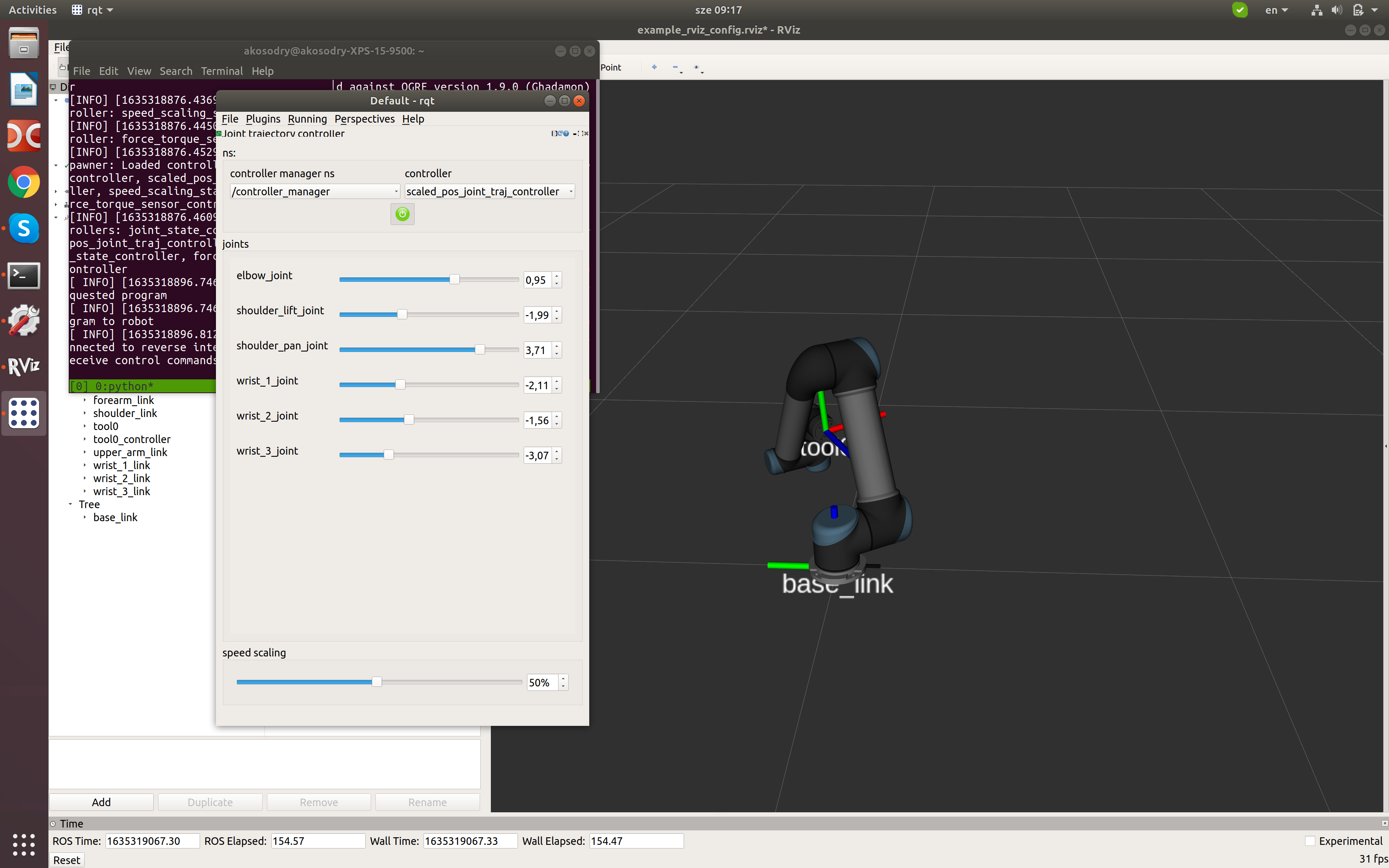
4.I even checked the tool pose with a transform listener, and i got again different values than in the TP. 
Can you give some hints where can be the problem?
UPDATE: I checked another two different poses. POSE1:
Reallity:

Corresponding pose in RViZ:

POSE2:
Reallity:
Corresponding pose in RViZ:
MY OBSERVATION
There is a PI offset for joint_3 and also PI offset for joint_4. Am I correct?
Looking at the kinematics.yaml file above, there are lof of PI values. Also these calibration values seems to be quite large for me. Is it possible that the robot was wrongly calibrated?
Thanks in advance. Best regards.

I don't know what causes this, but re: "transform listener": you cannot compare
base_link->tool0to your TP.For one: you have
Viewactive on the TP. That shows you a convenient rendering of the robot with an arbitrary viewpoint which you drag around. The values shown are relative to that viewpoint. Your TF does not work that way, so those values won't match.Second:
base_linkdoes not correspond to UR'sBaseframe. The only frame in your URDF which would correspond to that would bebase. So you should be looking atbase -> tool0.And even then, that transform will only match if you have an "all zeros" toolframe configured on the UR controller.
And only if you have the TP set to
Baseview.See also Universal_Robots_ROS_Driver#468.
And some things to check:
- you're using the correct
- you're not actually connecting ...
(more).launchfileAlso: please attach your images directly to the question. You have more than enough karma to do that.
Don't link to external sites for images. Your question should be stand-alone.
I'm going to close your question for not following the support guidelines until you fix it. And then we can re-open.
You don't need to post a new question, just edit your current one. You can use the
editbutton/link for that.@gvdhoorn thank you for the comments. Yes I have all zeros at the TCP configuration. But I will check the
Baseview as well.Nevertheless, the problem is that if
ur_calibrationstep is skipped, then robot pose is the same in both ROS and reality, otherwise as i mentioned totally different pose is shown..Regarding the
base_linkissue: i used thebase_linkso far as my reference (when calibration was skipped) and it was relevant to me (robot pose, planning, motion execution), but i will also check the difference withbase.And yes, i'm launching the correct launch file. UR-Sim: i don't even use the UR simulation environment.
I will come back next week Monday to these issues.
no.
That's a symptom.
We don't know what the problem (ie: cause) is.
And there may be something special about your robot or the process you follow.
I would suggest posting on the issue tracker.
Do mention you've already posted here and on the UR forums, so we can avoid splitting discussions.
@gvdhoorn Hi! I updated the post with two more poses, and i recognized some joint offsets. Can you check the update? Thank you in advance!
As I wrote earlier: please post this on the issue tracker of the respective package.
You could be running into some issues due to either your robot being an "outlier", or something else. This doesn't seem to be a configuration issue any more.