
difference in the out of /rtabmap/localization_pose AND tf_echo base_link map
hi everyone,
why does the output of "rostopic echo /rtabmap/localization_pose" is not nearly the same as the output of "rosrun tf tf_echo base_link map"??
rostopic echo /rtabmap/localization_pose
header:
seq: 196
stamp:
secs: 1635782243
nsecs: 203865051
frame_id: "map"
pose:
pose:
position:
x: -1.5592828989
y: 0.962841153145
z: -0.0775390192866
orientation:
x: 0.00117897975686
y: -0.0111340316652
z: 0.250081671479
w: 0.968160011232
rosrun tf tf_echo base_link map
At time 1635782334.518
- Translation: [-11.030, -1.230, -0.004]
- Rotation: in Quaternion [0.004, -0.005, -0.217, 0.976]
in RPY (radian) [0.011, -0.009, -0.438]
in RPY (degree) [0.615, -0.492, -25.083]
Does anybody have any idea? any suggestion? thanks


I'm not very familiar with
rtabmap, but looking at your timestamps, it seems the outputs are about 90 seconds apart. A cursory search tells me thatTo me, it sounds like the difference is just due to motion between the two times. Does that seem plausible?
@tryan, thanks for replying to my message, sorry, now i have provided the output of these two command in the nearly the same timestamp: but you can see that the pose are showing comletely different!!!
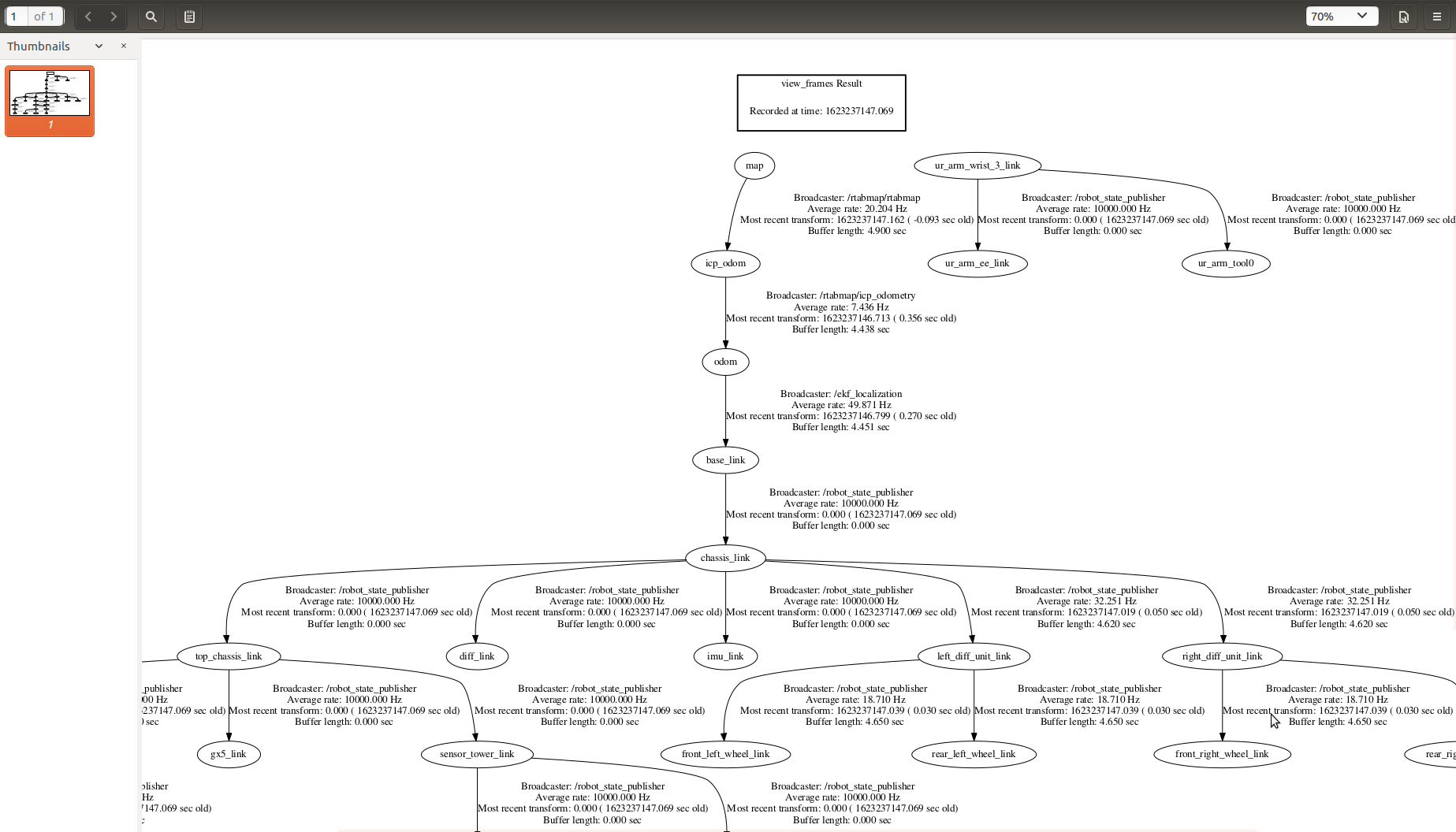
Does
localization_posematch the/map -> /odomtransform?i think they should be nearly the same. because localization-pose is also publishing when the robot moves in the mapping mode, and on the other side the tf between map and base_link shows the transform between these two.