
map frame is not in the same direction as base_link frame
hi,
I have noticed that with turning on the robot,and after launching SLAM, i can see that map frame is not in the same direction with base_link frame (X Y Z). HOW can I change the map frame to be align with base_link at the initial state?!? totally should they be in the same orientation??? I have launched rtabmap slam, and I don not know maybe the problem is about this slam!!!
you know what makes me confuse, is REP 103 and also the information that i mentioned here https://github.com/cartographer-proje... about the initial orientation of the map frame. in terms of REP 103, and considering my case, the orientation of the base-link is In relation to the body and it shows x forward y left z up and the map frame follows the ENU convention: X east Y north Z up
SO why the map frame should be in the same orientation of base_link frame?
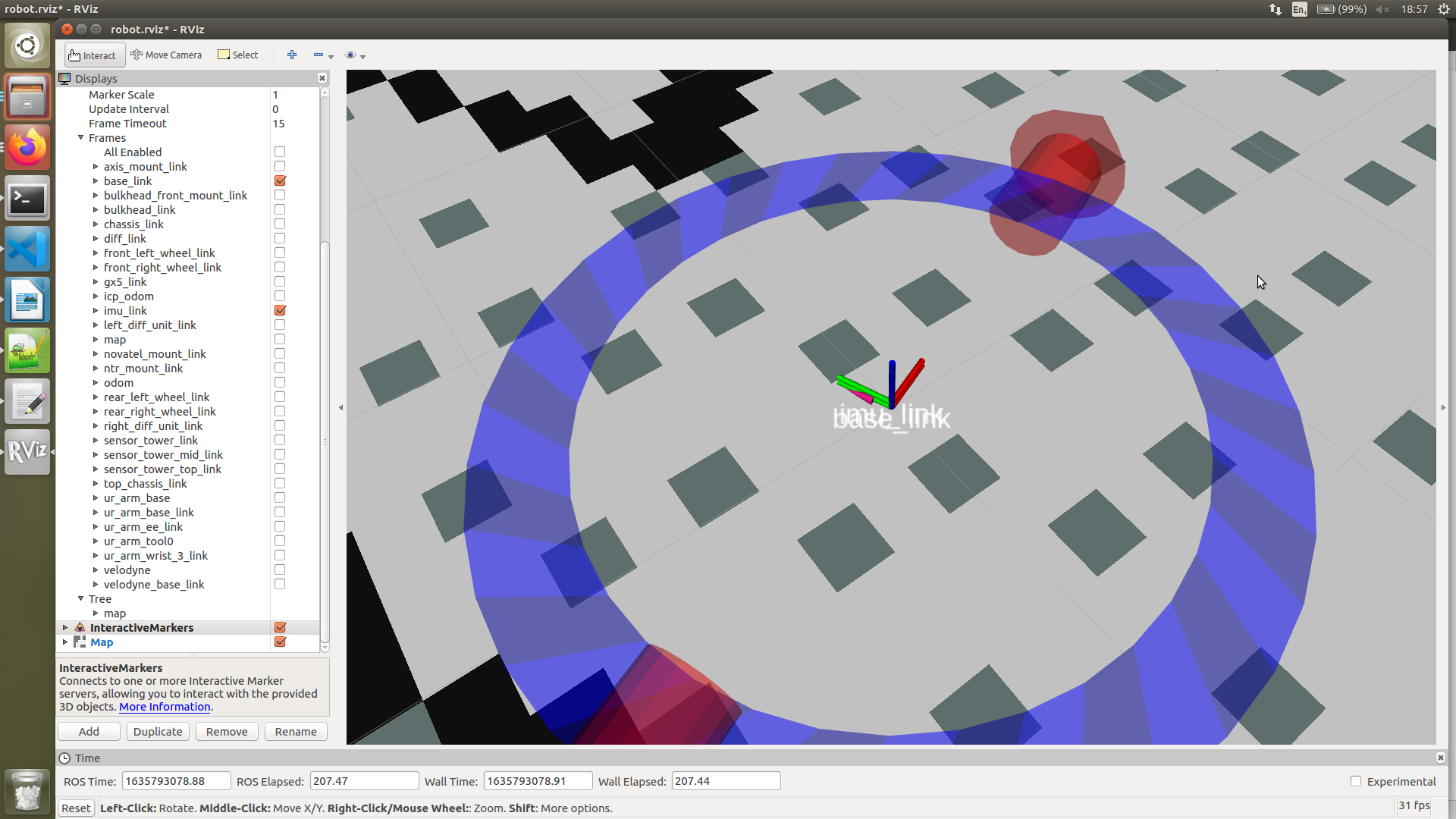
base_link

base_link and map frame, that as you can see, map frame has a 90 degree rotation from base_link

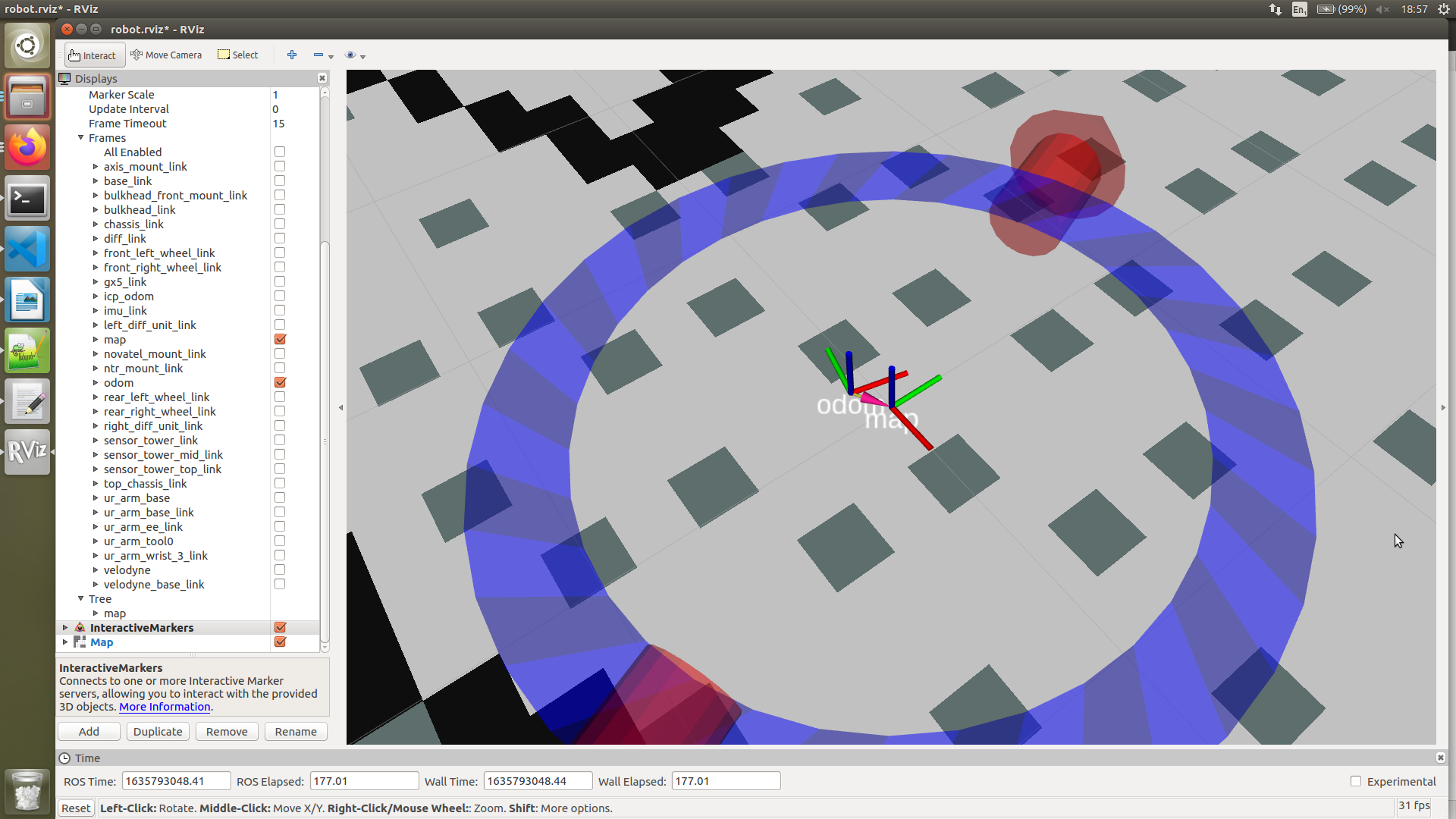
odm and map frame
base-link and imu_link
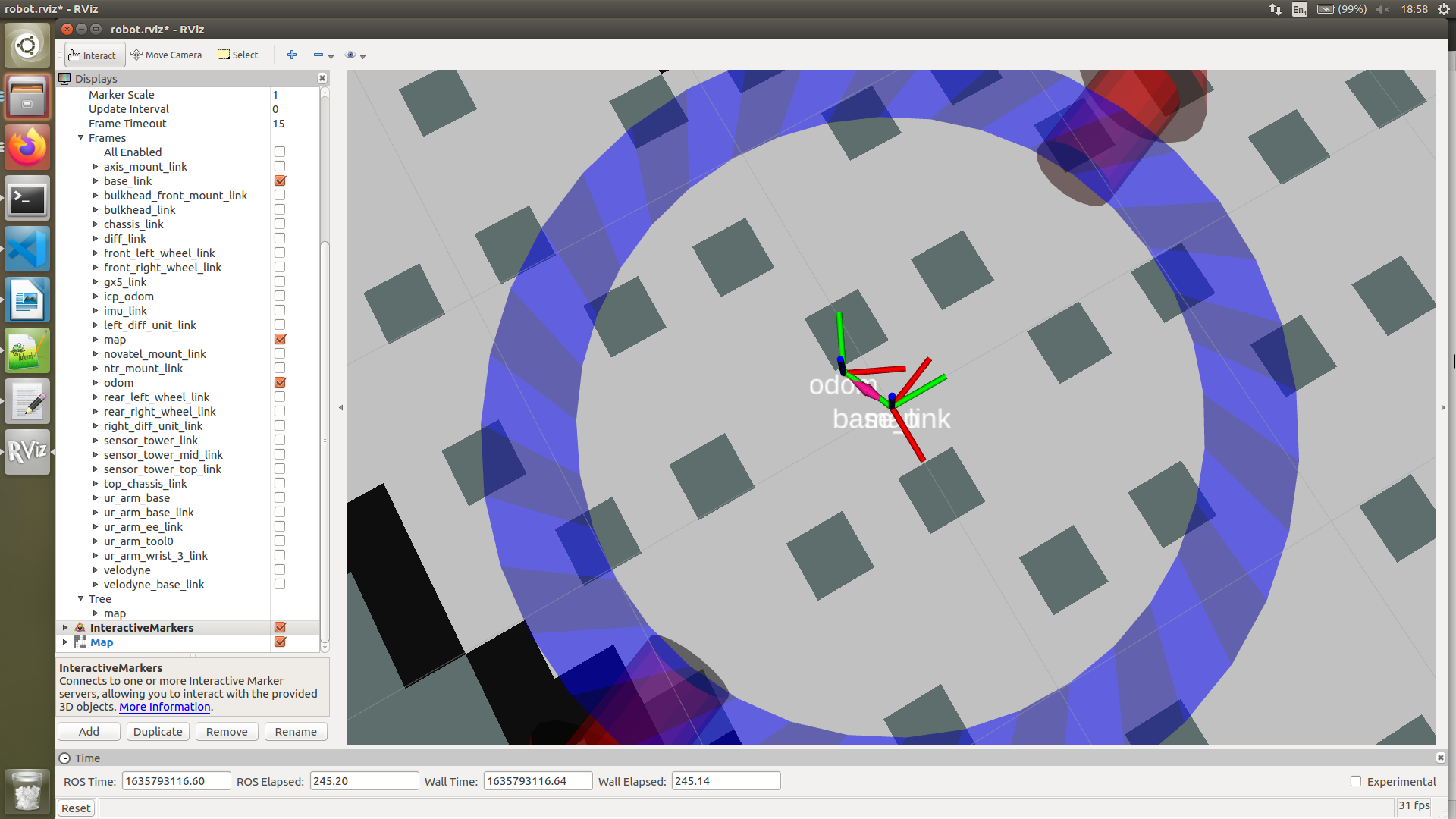
base_link, map and odom frame
Thanks

according to the right hand rule, map frame should also be in the same direction (x forward, y left, z up) as base_link frame. I am using RTABMAP as map provider and using robot-localization pkg in order to publish the map frame. Now how can i make the map frame to show the same x y z as base_link frame?
Hi @Masoum, there may be issues at the
urdflevel when describing the relationships. Please take a look at this discussion, not with RTABMAP but with Cartographer: https://github.com/cartographer-proje.... To be able to help you, more details are required. Can you explain what have you tried so far?hi @osilva I have attached the frames in my question, just a i have take a number of pictures to be able to specify each of them. the urdf is ok for my case.
is there any answer?
Can you show the
urdfrelationship ofbase linkandimu_linkand the other links plsRviz is just a visualization tool so if you are seeing issues most likely is the orientation used
base_link and imu-link are considered relative to chassis link @osilva
<link name="base_link"></link>
..................................................................
Is there any solution?