
No world frame in tf tree
Hello, I'm working on two turtlebots and I have managed to make them run in the same simulation. I have gotten a TF tree that looks like this:
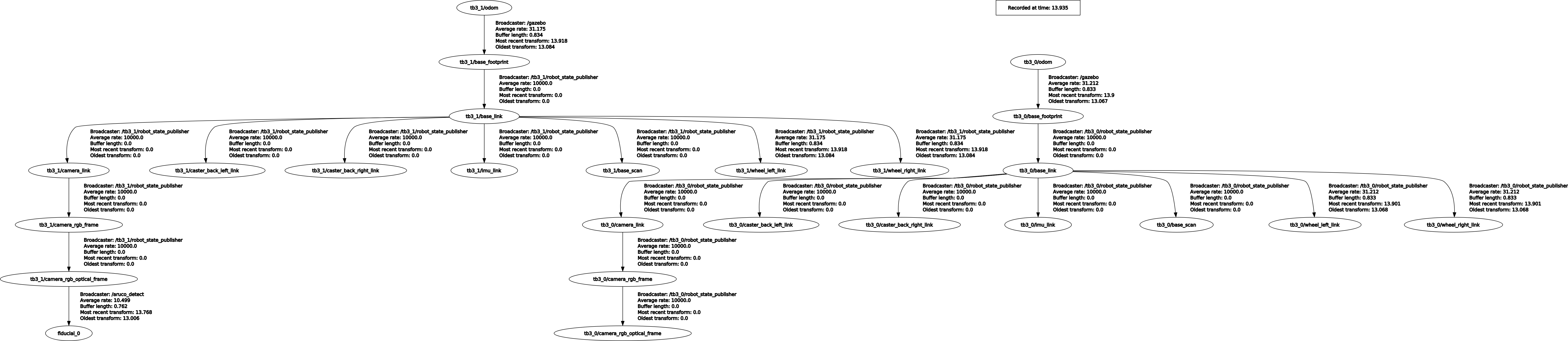
and now I want a /world frame to connect these two robots so that I can get a better visual representation of their frames in Rviz. Wondering how I'd get a /world frame, I have seen that you can create a /map frame by using SLAM and making the turtlebot explore a map/ use localization, but is there no simpler way of doing this? I'd like to have an empty world with just a fixed frame.
add a comment
