
correct model design for grasping (Moveit)

Hi!
I am relative new to ROS and Moveit. I am using ROS noetic. For a research project, I want to realize automated trajectory planning for an FANUC industrial robot for handling pipes with high variation of geometry. In the last weeks it was possible for me to build up a basic model:
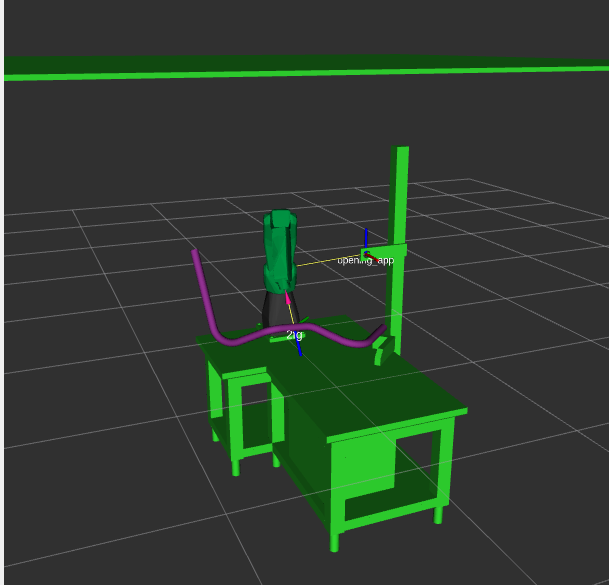
In python I calculate the grasp points and targets for the trajectories based on a bracket, which position the tube on a table. After that I start planning and execution. All this works awesome fine for me. But grasping with pre grasp approach and post grasp retreat is not working. I get the error message "Fail: ABORTED: Must specify group in motion plan request". I think the reason for this is an inelegantly builded model. I am thinking the grasp msg is correct defined.
I think this is the main problem for the grasping error, I modified the fanuc pkg by adding a new link/joint in the cr7ial_macro.xacro to simulate the gripper (distance flange/TCP). I do not need to add the geometry of the gripper to the collision control because a collision is physical impossible. So, (pre) grasp posture is also not nessesary. I tried to modify the xacro-file by creating a new xacro file, but it was not possible for me just with the information of the tutorials.
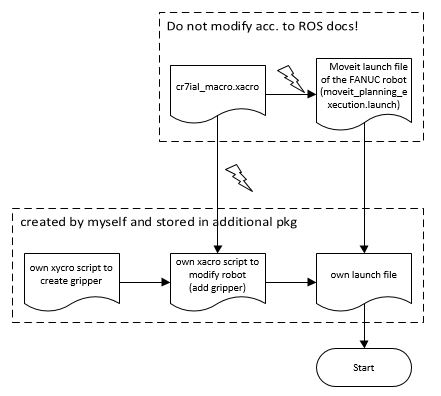
Main reason is, I do not understand the interaction of the launch files of the fanuc pkg, an own launch file and an addition xacro script:
- Own launch file to start all the stuff incl RviZ
- Own xacro script to create gripper
- Own xacro script to modify robot (add gripper)
- Moveit launch file of the FANUC robot (moveit_planning_execution.launch)
- cr7ial_macro.xacro
Can you explain the interaction of the files of an existing industrial robot pkg? Do you need further information? Please feel free to answer. At the moment I am not feeling certain how to move further with the model creation. Thanks and best regards!
nico

I understand why you did it, but could you please try to avoid including multiple questions in a single post?
Contrary to a forum, ROS Answers is a Q&A site (similar to Stack Overflow/Exchange) and works best with a 1-to-1 ratio of questions to answers.
Multiple questions in a single post have very poor visibility (as the relation to the question title is limited).
Please identify which question is your main one and update your post to focus on that one. You can use the
editbutton/link.I understand... I modified my post. The key question at the moment is the interaction between the files.
Could you clarify what you mean by "interaction"? All those files make sense to me, and their interaction can typically be deduced by following the various
includestatements in them.What is specifically unclear to you? Could you give an example?
I added a picture of the schematic interaction of the mentioned files in my question.
My missunderstanding is marked with flashs:
The cr7ial_macro.xacro would be included by my own xaxro-file for modifing the robot (add a gripper). But the cr7ial_macro.xacro is also referred by moveit_planning_execution.launch file which is included in my own launch file to start everything, but I have to include my own xacro-file also in my launch file, right? So, the definition of the robot is "presented" two times in my launch file?