
TF is broken when using robot_localization package with only IMU sensor and how correctly to use and configurate the package?
Hi m using this robot_lokalization package to obtain the linear velocity. As only sensor input in my case is IMU. I configure the parameters and set the frames as follow
map_frame: map
odom_frame: odom
base_link_frame: /thrbot/base_link
world_frame: odom
The launch file is the following one
<launch>
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se" clear_params="true">
<rosparam command="load" file="$(find robot_localization)/params/ekf_template.yaml" />
<param name="odom_used" value="false"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_imu" args="0 0 0 0 0 0 /thrbot/base_link /thrbot/imu_link 100" />
</launch>
The robot base_link frame is thrbot/base_link and the IMU one is thrbot/imu_link
Here is the photo of the TF without using the package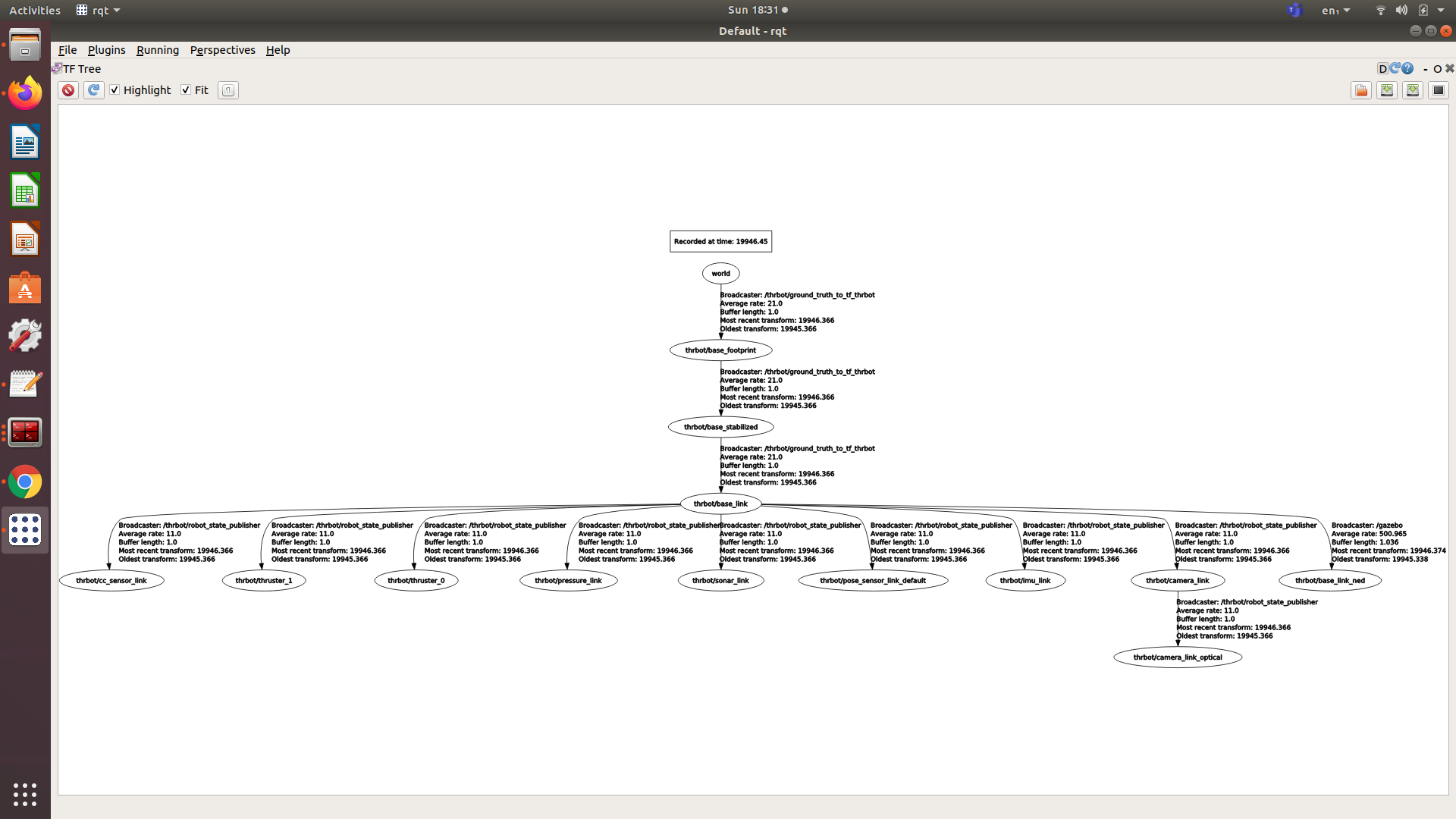 but when launch the package with the above launch file the TF is not correct anymore as can see here
but when launch the package with the above launch file the TF is not correct anymore as can see here 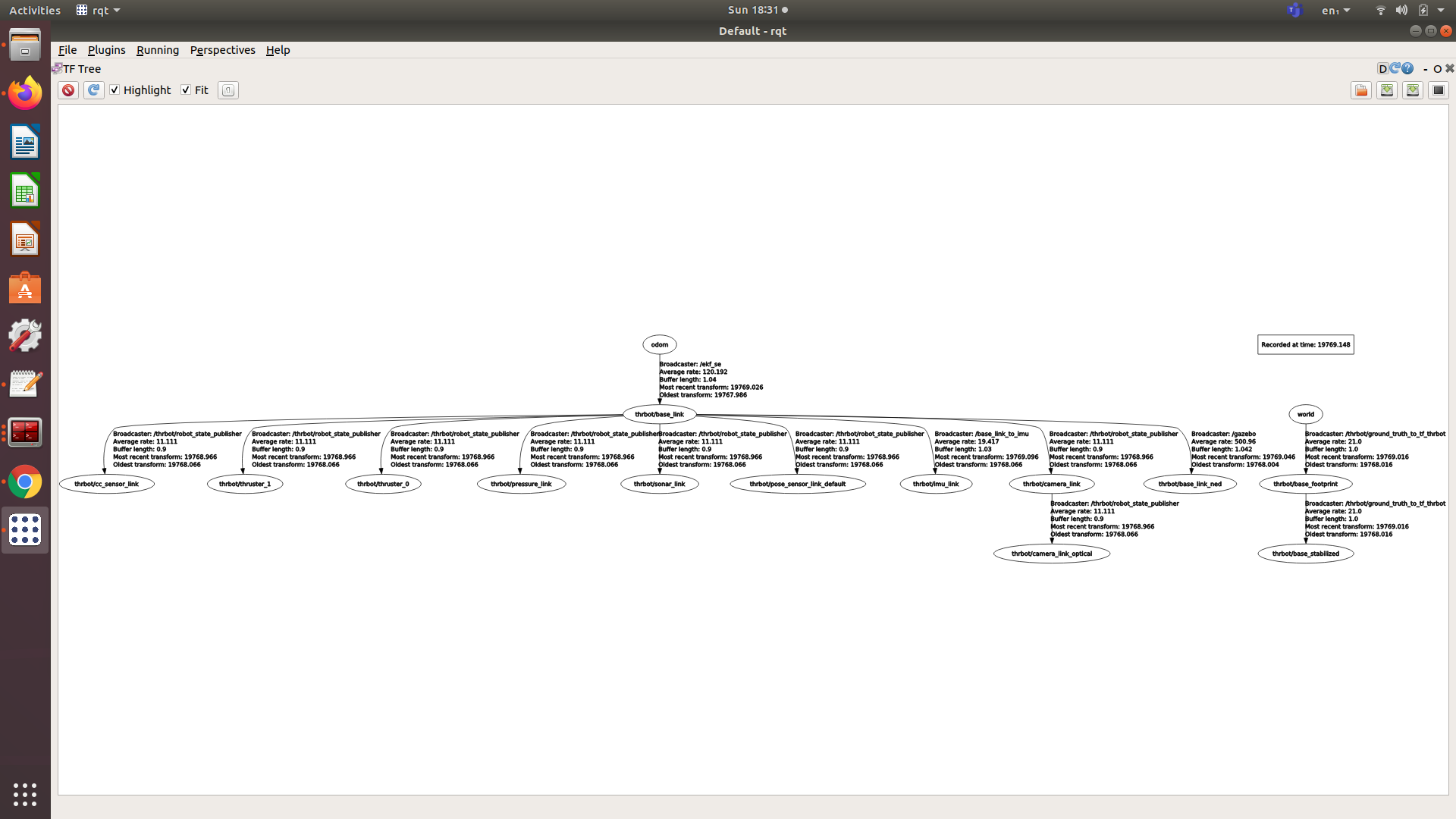 .
.
To fix the TF i change the configure the parameters in ekf_template.yaml as follow
odom_frame: odom
base_link_frame: /thrbot/base_footprint
world_frame: odom
and the launch file to follow
<launch>
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_se" clear_params="true">
<rosparam command="load" file="$(find robot_localization)/params/ekf_template.yaml" />
<param name="frame_id" value="odom"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_odom" args="0 0 0 0 0 0 /odom /thrbot/base_footprint 100" />
</launch>
Now the TF looks good as can see 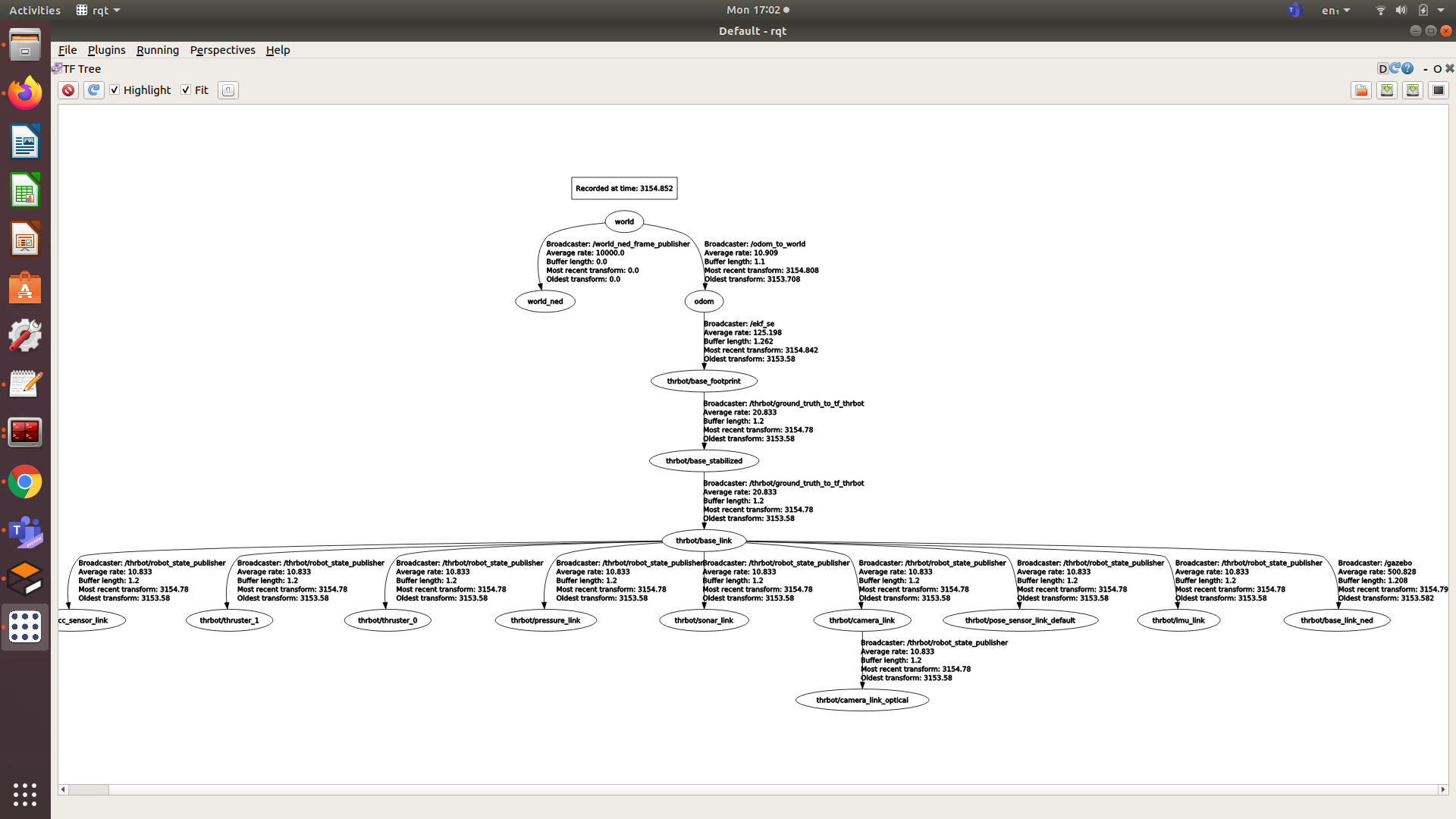 Than following parameters are configure in
Than following parameters are configure in ekf_template.yaml:
imu0: /thrbot/imu
imu0_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]
imu0_remove_gravitational_acceleration: true
imu0_nodelay: false
imu0_differential: false
imu0_relative: true
imu0_queue_size: 5
imu0_pose_rejection_threshold: 0.8
imu0_twist_rejection_threshold: 0.8
imu0_linear_acceleration_rejection_threshold: 0.8
My question is now is this correct configuration for underwater UUV with only IMU sensor input to get linear velocity(regardless of the accuracy and the accumulated error)?

What are the specs of your IMU?
This paper discusses the performance and limitations of IMUs for UUV applications: https://www.researchgate.net/profile/...
Since there are many factors involved. You are right in pointing out the accumulated errors even when using EkF. Is there any chance to go above water and get calibration with GPS?
Ok. First my question here is regarding the correct use and parameters setting of the robot_localization package when only IMU sensor input is available. Please can you read the question and if can help regarding that would be great. Second, this are the specs of the IMU ADIS16448. Third , I will do sensor fusion of IMU and the Z (component) of the Pressure sensor( barometer) and we suppose the sea level is always flat.But that the second step, first I wanna get some value for the linear velocity only using IMU as that value need it for my simulation. Hope more clear now and appreciate if can help?
Thank you for the clarification. When I read the documentation of this package and refer to the tutorial I think one component missing it’s the covariance matrix setup. Not sure if you have done already. As your sensor specs will help with this.
ok. But thats more on the parameters tuning. Im asking about overall setup and how correctly to set the frames(as its must be locally everything) in order to get correct Linear velocity output from this package.