
ROS Navigation costmap problem
Hello, I am a beginner in ROS and I am having some issues in doing navigation with my robot.
While is navigating, when I turn the robot the map also makes a turn. When I define a goal, the robot define a path, but when the robot make a rotational movement, the map also rotate, consequently the path changes and send the robot to a different position or stops. But this just happens when the map is dynamic. I have already seen lots of tutorials like Navigation Stack.
I think that is a problem in the tf, but I am not sure.
Can someone give a help?
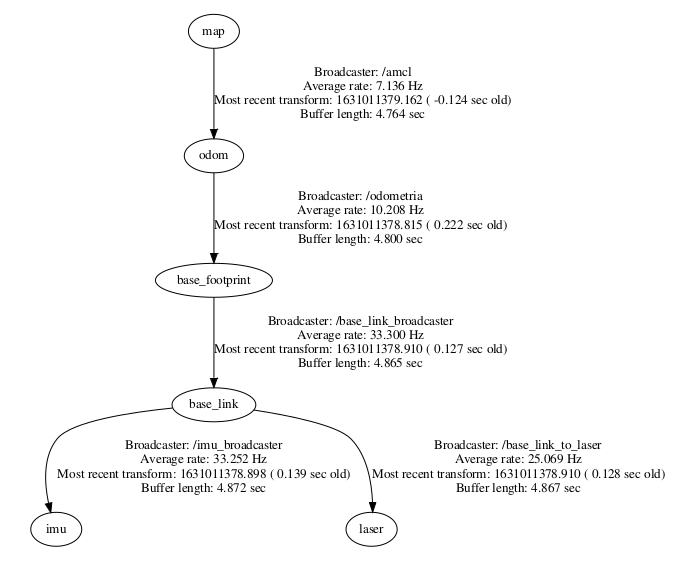
The tfs are:

Hi, could we keep in touch about this project? I´m currently trying to run a robot based on all these stuff. Thank you.
A ros system can have a global map, a global costmap, and a local costmap. Which one of these are you calling "the map"? The plugin name in rviz will indicate which of the 3 it is.
I think I am using the global map.
The global map should not move. In rviz, in the
Displayspanel on the left side, toggle the check marks until the map disappears/re-appears. Then expand the entry using the little triangle, and tell me the full path in theTopicfield.The link has a video showing what is happening. link: https://we.tl/t-zfkMIwVjXz
Hello, @MKMTI, could you send your workspace to me? Or maybe post ur config files in a comment, please?
heres the link: https://we.tl/t-gZrf7ijMIZ
@MKMTI Is there the navigation package? Can't see It.