I have tested this demo with foxy/galactic/humble, and only with humble it will work like your description.
So my best guess is the demo you are using contains this commit, which should only be available since humble.
The foxy/galactic document is somehow wrong:
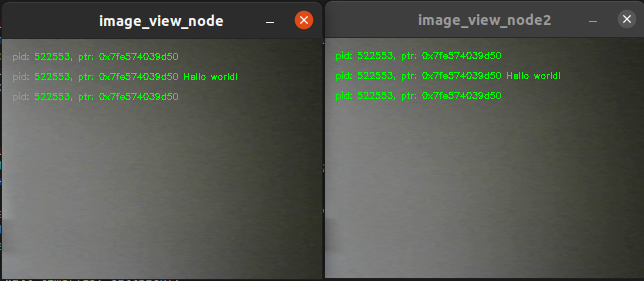
This means the system deliveres the same shared_ptr to both callbacks. When the first intraprocess subscription is handled, the internally stored unique_ptr is promoted to a shared_ptr. Each of the callbacks will receive shared ownership of the same message.
The foxy/galactic demo's ImageViewNode callback used type const sensor_msgs::msg::Image::SharedPtr as argument, and it's NOT shared ownership. Then the intra-process logic have to copy the message to make sure each ImageViewNode will have exclusive ownership of the message dispatched to them, which behaves the same as callbacks using type const std::unique_ptr<sensor_msgs::msg::Image>.
The humble demo's ImageViewNode callback changed the argument type to sensor_msgs::msg::Image::ConstSharedPtr, and now it really means shared ownership. Then the demo behaves like your description, so the humble's document should be updated to reflect this change.
The intraprocess zero copy for multiple subscriber should always work since foxy, as long as you are using the correct signature for callbacks.
The callback argument type and ownership relationship can be verified using this snippet:
#include <iostream>
#include <memory>
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/image.hpp>
template<typename TCallback>
void PrintAnyCallbackSharedOrNot(TCallback&& cb) {
rclcpp::AnySubscriptionCallback<sensor_msgs::msg::Image, std::allocator<void>> acb{std::allocator<void>()};
acb.set(std::move(cb));
std::cout << acb.use_take_shared_method() << std::endl;
}
int main(int , char *[]) {
// false
PrintAnyCallbackSharedOrNot([](std::shared_ptr<sensor_msgs::msg::Image>){});
// false, same as const sensor_msgs::msg::Image::SharedPtr
PrintAnyCallbackSharedOrNot([](const std::shared_ptr<sensor_msgs::msg::Image>){});
// true, same as sensor_msgs::msg::Image::ConstSharedPtr
PrintAnyCallbackSharedOrNot([](std::shared_ptr<const sensor_msgs::msg::Image>){});
// true
PrintAnyCallbackSharedOrNot([](const std::shared_ptr<const sensor_msgs::msg::Image>){});
return 0;
}