
Obstacle layer not shown inside robot footprint
Hi,
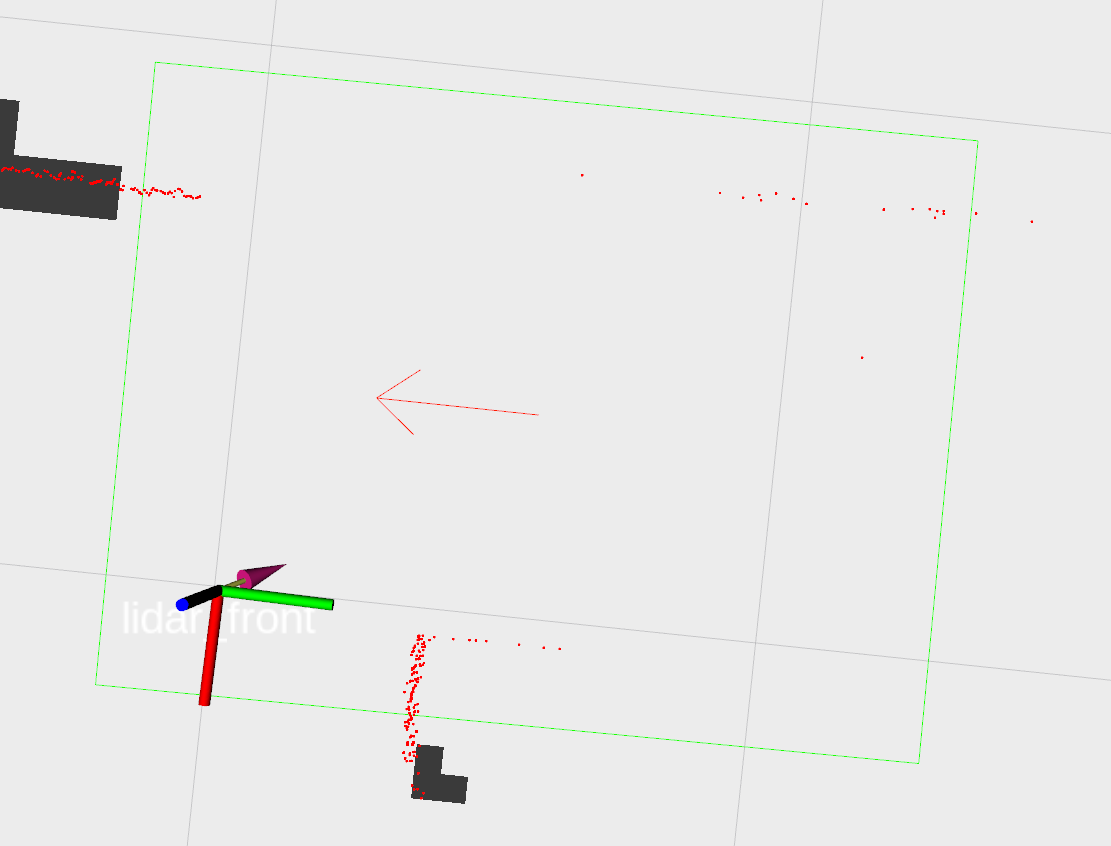
I am using costmap 2D Obstacle layer with my lidar data. I want the obstacle layer to also show up inside the robot footprint, which is does not as seen here. I have tried changing footprint_clearing_enabled parameter in Obstacle Layer but that does not seem to help. Can anyone suggest what am I missing here?
add a comment
