
multi robot TF drifting in navigating to goal

Hi i have been trying to setup multi robot in the ROS Melodic for RRT Exploration but somehow encountered weird issue.
The map for individual robot will drift from time to time.
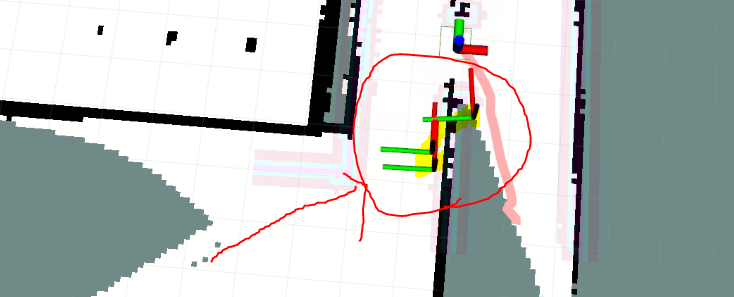
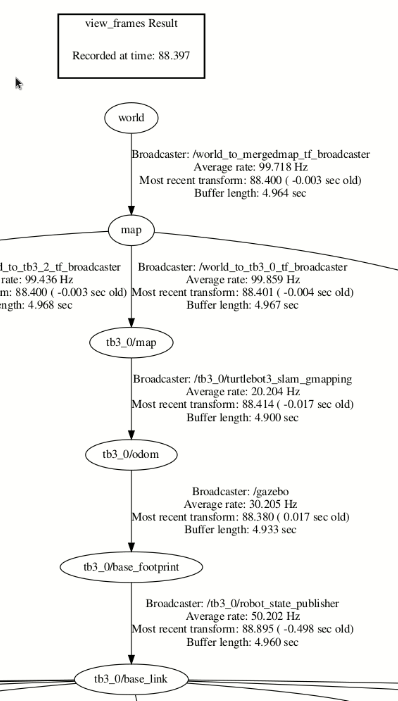
This resulting the map shifting time to time and resulting the bad map merging issue. I did use gmapping and amcl (for localization) but always end up drifting. To clarify, i did use static tf publisher to link world to map, and map to individual robot's map. I did aware the original author has global frame is robot 1 map instead of world, i would prefer link to map rather than individual robot map. The TF is presented as follows:
Anyone have encountered something similar? Feel free to provide some advice. Thanks

if you use gmapping to generate multiple maps, definitely each map will be different.
of course i know each map will be different for each robot. That's why I have used a feature-based map merging to merge the three individual map into map.
My concern is the drift sometimes is too large (>1m) resulting output map is somehow skewed.
You mentioned that you use gmapping and amcl. but in the mapping process, there is no need to have amcl running at the same time.
to clarify, i did run with and without... both resulting same output.