
rtabmap deviating path
I am trying to get rtabmap working on an outdoor environment where there is not a lot of features (Something like a dessert, I only have small ground features to rely on) I am using this example's launch file modified a bit for my topics and tfs. I am using a stereo odom and stereo images for mapping.
I am a noob to the rtabmap. In the rtabmapviz, I see two lines getting drawn as the robot moves. A blue line which I am guessing is the path rtabmap detects, and a white line which I think is the odom provided path. (Am I correct here?)
At start, the detected path (blue) follows the odom path (white). But after some time it starts to deviate and time to time, again intersects with the odom path.
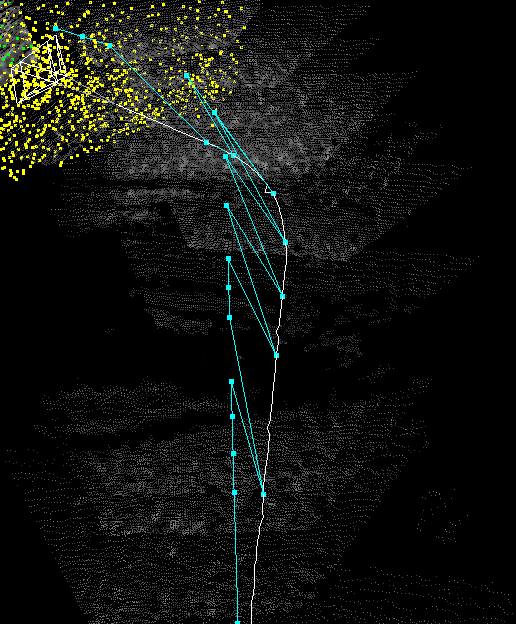
The deviated path also seems to be aligning as a valid path with some offset to the odom path. In my observations, visual odom performed very good in my environment. So I am hoping for the detected path to be closely following the visual odom. Can someone please explain what is happening here?

It looks like you have two odometries publishing on same TF frame, what is the TF tree?
rosrun tf2_tools view_frames.py