
Robot spawn at a wrong location in rviz
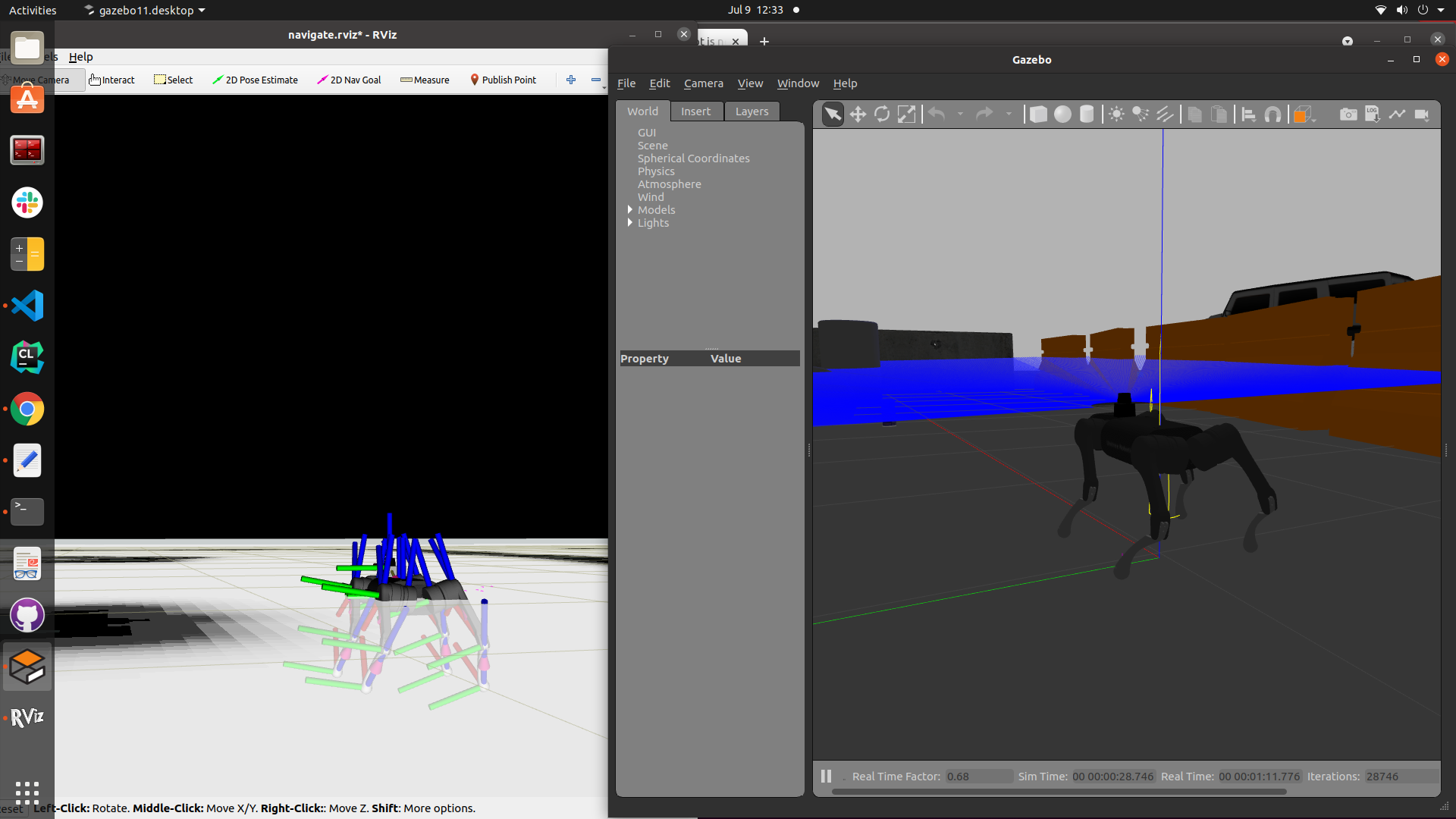
I have a quadruped model that I have made it to spawn in gazebo successfully with contact sensing. However, when I launch the file in rviz using below snippet in my launch file, the robot spawns in rviz in a way that its foot is not touching the ground but the body is rather floating on the XY plane. (Picture attached). What could be my issue? URDF seems fine since the model spawns successfully in gazebo, but it just seems wrong in rviz.
<param name="robot_description" command="cat '$(find a1_description)/urdf/a1.urdf'" />
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" output="screen"
args="-urdf -z 0.6 -param robot_description -model a1_gazebo -unpause" />
add a comment
