
PointCloud 2 data in turtlebot simulation

hello,
I am running turtelbot simulation and when i Use rviz to visualize pointcloud2 data than it gives incorrect point cloud . How i can fix this? any tips would be appreciated As i am new to ros.
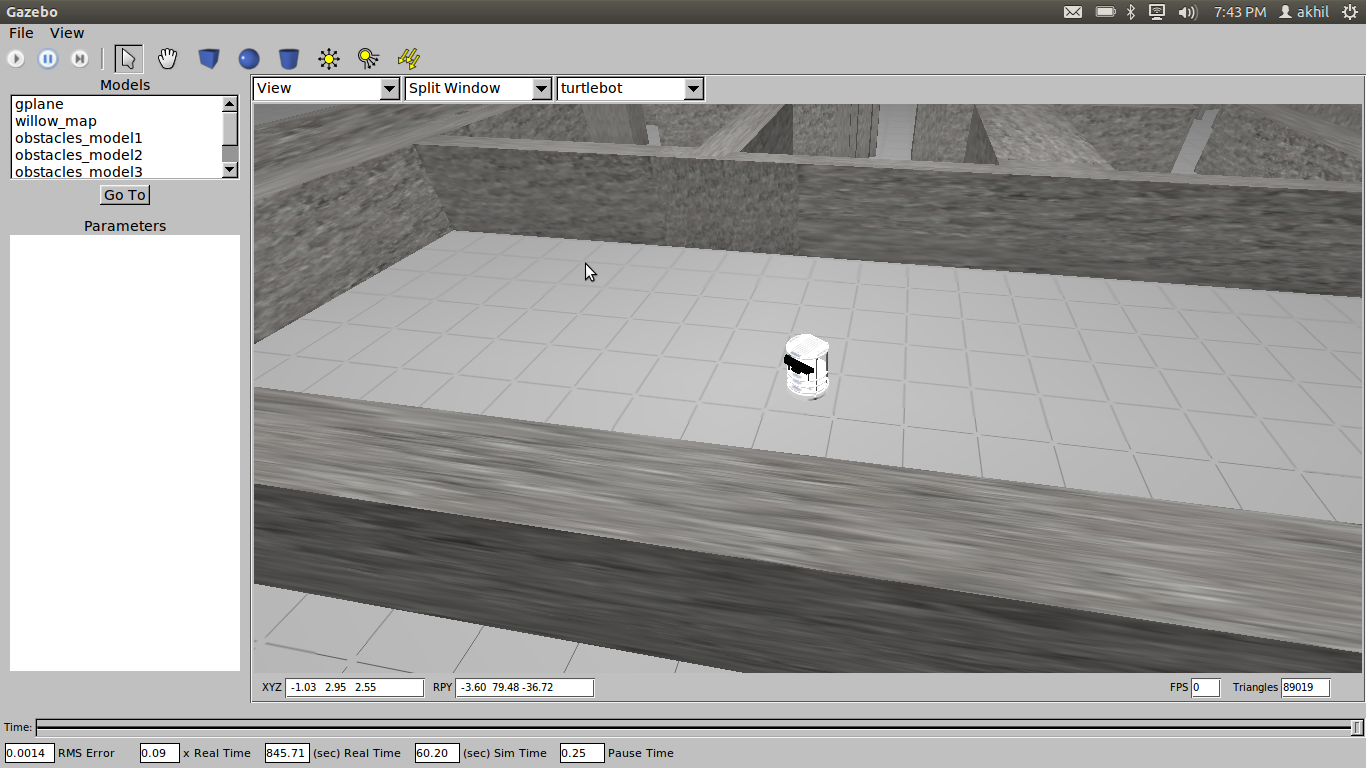
In the world image there is no object just in front of the robot but rviz shows some points there ,also when i try to run the robot this "patch" of ploint cloud keeps moving along with the robot .
because of this I am not able to build the correct octomap as it uses pointclud2 data.
I observed that the pointcloud is not forming correctly. Even the clouds of the ground are shown as walls. Below is the pic of the situation with both world and rviz view of the pointclouds. Any help here is appreciated!!! My situation is shown in the attachments.
 )
)

Problem not with the frame of reference but with the pointcloud simulated from the gazebo. It looks like a bug. Any suggestion to overcome this is appreciated!!!

