
Navigation path planning over long distances
I'm having an issue with move_base and/or Navfn whereby the control system can't plan a path for anything over a certain distance.
The path planning (and following) works fine for short nav goals:
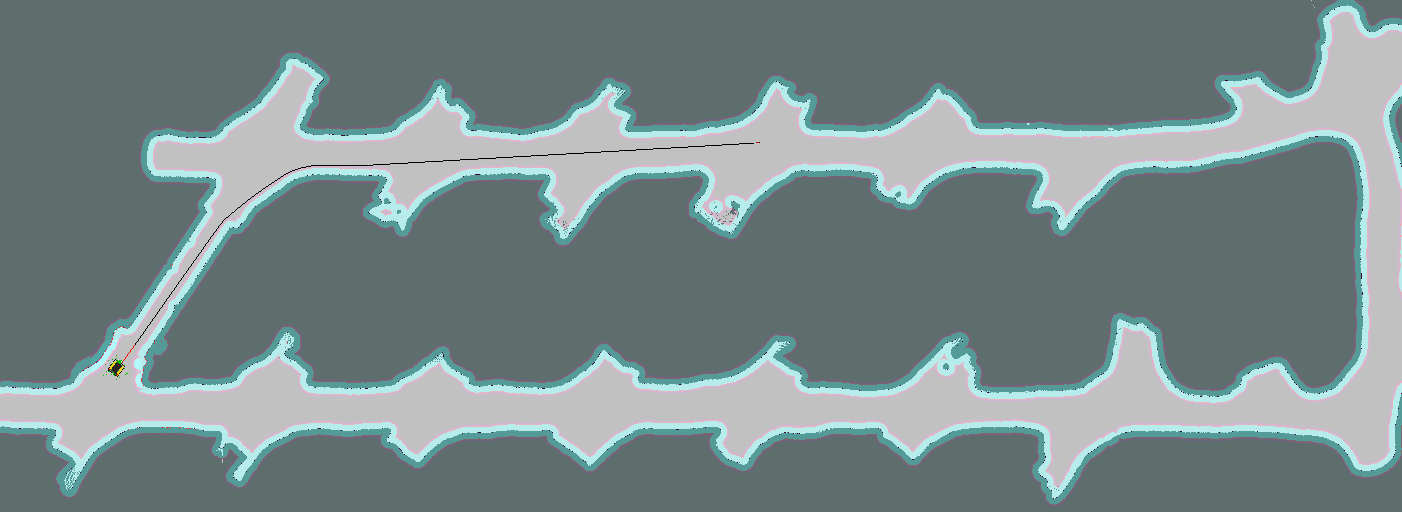
But then if I give the robot a longer goal, it either:
1) Plans the path backwards from the goal location, but doesn't reach the initial pose of the robot:
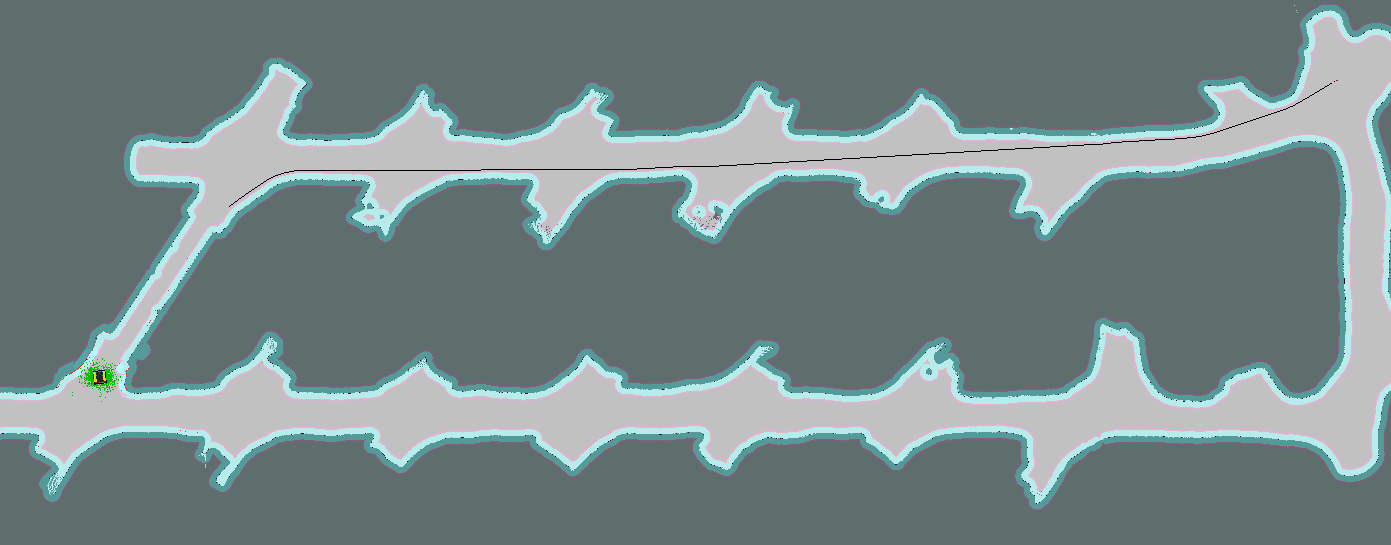
or 2) Doesn't even plan the path.
Regardless of if it was 1) or 2), if the goal is too far away, it clears the costmaps and starts a recovery behaviour (for some reason??)
[ INFO] [1624828201.921, 2362.060]: Got new plan
[ WARN] [1624828210.322, 2370.460]: Clearing both costmaps to unstuck robot (3.00m).
[ WARN] [1624828218.801, 2378.940]: Map update loop missed its desired rate of 0.2000Hz... the loop actually took 12.6100 seconds
[ WARN] [1624828218.822, 2378.960]: Rotate recovery behavior started.
[ WARN] [1624828236.140, 2396.260]: Clearing both costmaps to unstuck robot (1.84m).
[ WARN] [1624828236.492, 2396.610]: Map update loop missed its desired rate of 0.2000Hz... the loop actually took 7.6700 seconds
[ WARN] [1624828244.932, 2405.060]: Rotate recovery behavior started.
[ WARN] [1624828245.263, 2405.390]: Map update loop missed its desired rate of 0.2000Hz... the loop actually took 11.4500 seconds
The issue seems to be similar to this problem here, except I can't seem to find where to edit the Navfn numbers...
I am well and truly confused with this one, so any help would be greatly appreciated!! :)

Just a quick comment: AMCL localises, it's not a planner.
I'm sorry to have to do this for something so seemingly unimportant, but please don't post screenshots of terminal text in question on ROS Answers. It's all text, so there is no need. Just copy-paste the text from the terminal into your question text. Do make sure to format it properly by selecting the text and pressing
ctrl+k(or clicking the Preformatted Text button (the one with101010on it)).You don't need to post a new question, just edit your curent one. You can use the
editbutton/link for this.After you replace the screenshot with the error message itself, we can re-open your question.
Thanks for the info gvdhoorn - tried reopening it but i supposedly don't have enough points. Are you able to help with that? Cheers
What was approximately the original distance to goal, in meters?
What is the size of your static map, in cells? In the question you linked to, @David Lu says there is a limit on the global path length. [update] Never mind, I just saw you're aware of this from your answer. In my defense, you answer buries the important info!
NavFnappeared to have a tantrum with anything over 140m/160m, so for paths greater than this (i.e. in the second image) the issue would occur. Ultimately, it seems that it's not the physical length of the path that causes the error, but instead, the length of the path in pixels (as per this question/answer here). By editing the scale of the map, the path pixel count is reduced and the path can be generated. Another thing to note: the map itself has max limits of 35000 x 16000 pixels, so yet another thing to be aware of.I had a very similar issue - mapping large areas of a sizeable warehouse - and found that lowering the map resolution to 0.2 still worked well. Admittedly, some support pylons disappeared off the map due to the dimensions being less than the map but didn't take long to add them back in using a map editor.