Traffic Light Recognition
Hi,
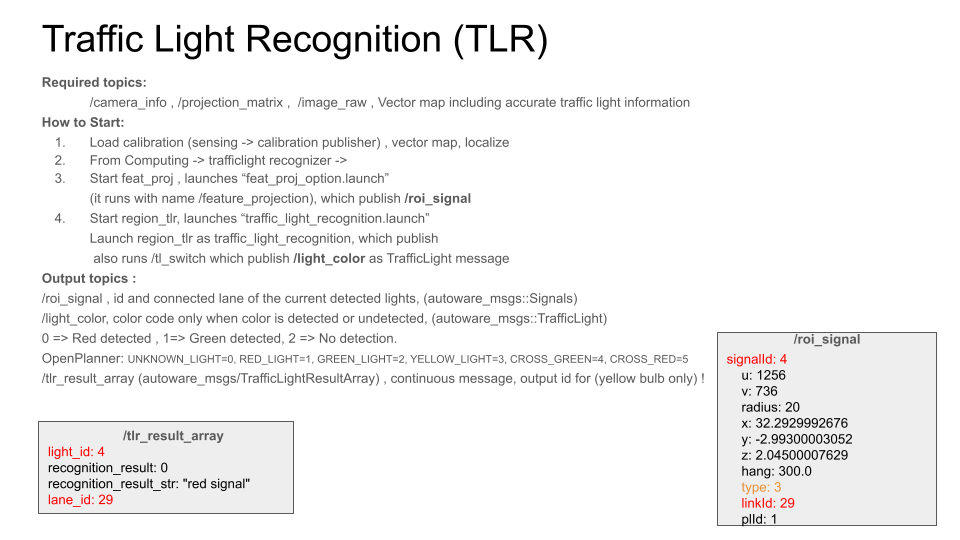
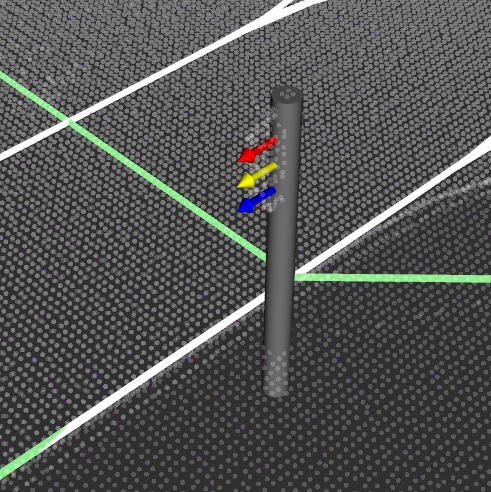
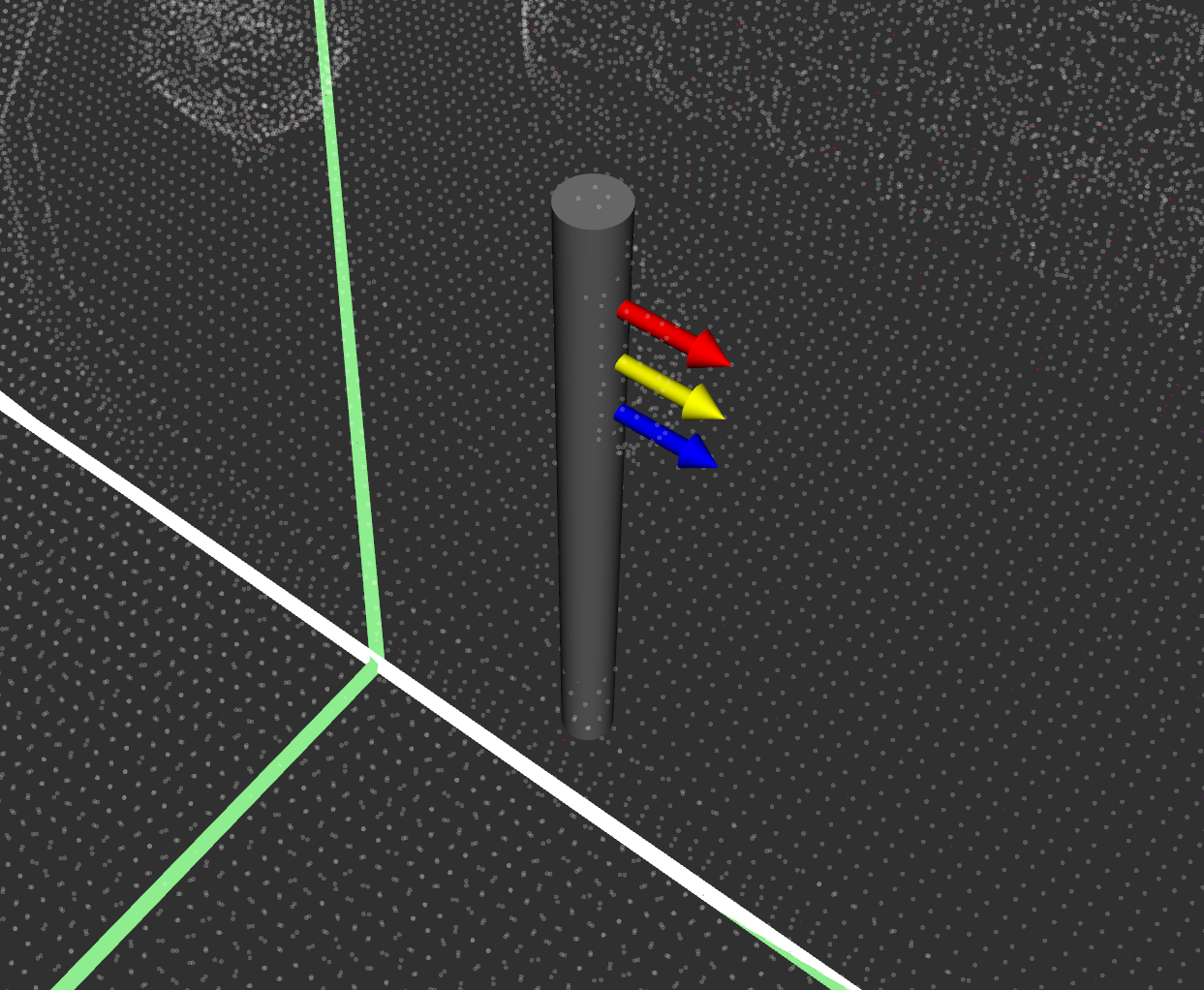
In the moment I am testing Open Planner with different scenarios in Carla + Autoware 1.14, Ubuntu 18.04. I am trying to implement traffic light recognition to test Open Planner in traffic light stop scenario. I have a vector map with traffic light data, when I launch the feature_projection node, it publishes the Roi_signal topic with no data. The camera s id and info are correctly define in the feat_proj_option.launch file. How can I fix this problem?
add a comment