
Trajectory Execution Completed successfully, but no motion is running .
Hello all,
I am Beginner to ROS. I am trying to do a simple pick and place action with the custom robot.I wrote a small piece of code to move the robot end effector to the graspin object position.While running my program, No motion is happening on rviz .But i am able to visualize the position and orientation values of end effector changing in the RViz's planned path's link.Also this pose is not target pose i had programmed. While using SetRandompose it works fine ,means robot move to some position. But while trying to input the same pose found from SetRandompose to Setposetarget, i am getting ABORTED.No Motion Plan Found or Warn ABORTED.No motion Plan found, Errors. Also, when i use setApproximateJointValueTarget method instead of setPoseTarget, i got no errors and in terminal i have"Trajectory Execution Completed successfully " ,but no motion is running on the robot. Also i had tried the similar error's solutions from the forum.Nothing works out.
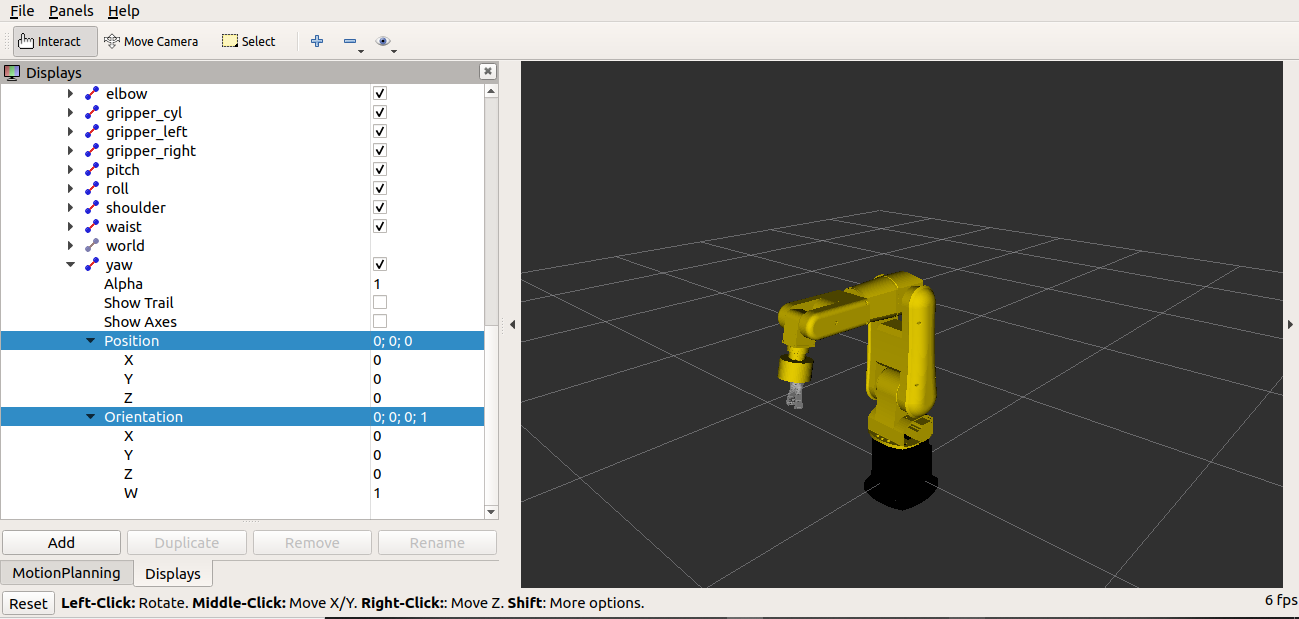
Before Motion Planning:
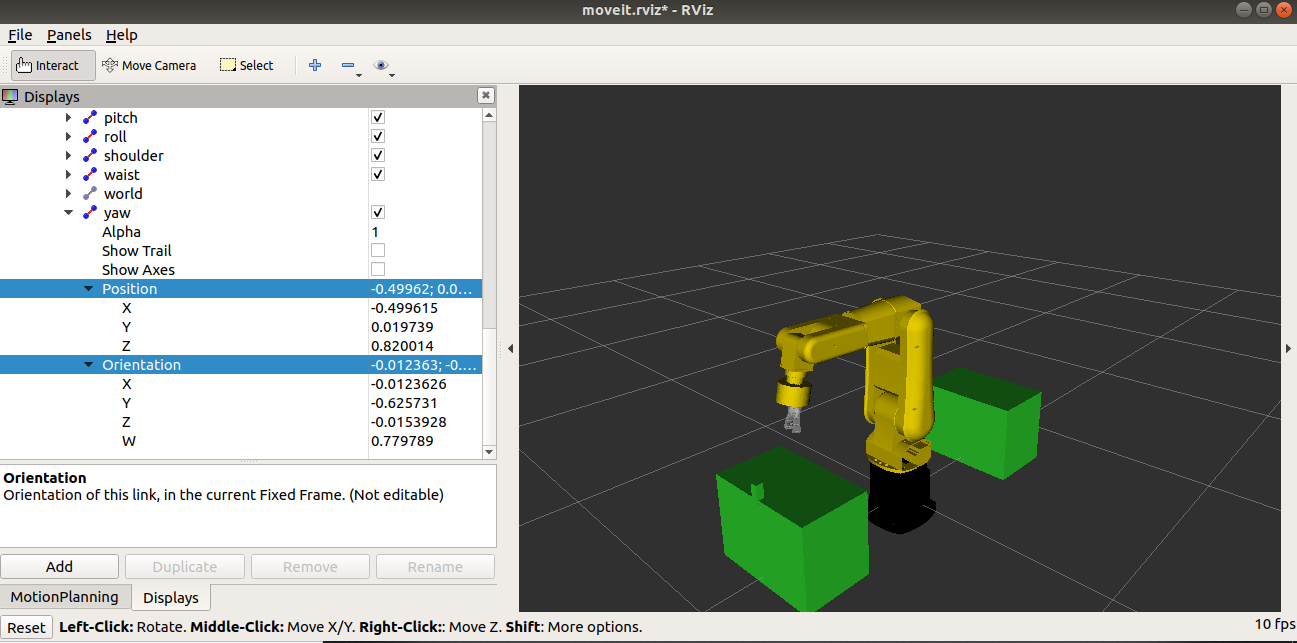
After Motion Planning:
My RVIZ Launched Terminal Output after planning Completed:
ros-industrial@ros-i-training-vm:~/simulation_ws$ roslaunch ar900_moveit_config demo.launch
... logging to /home/ros-industrial/.ros/log/eefa9f6c-d28b-11eb-839e-195df6f7b2c8/roslaunch-ros-i-training-vm-15242.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
Deprecated: xacro tag 'base_mesh' w/o 'xacro:' xml namespace prefix (will be forbidden in Noetic)
when processing file: /home/ros-industrial/simulation_ws/src/ar900_description/urdf/ar900.xacro
Use the following command to fix incorrect tag usage:
find . -iname "*.xacro" | xargs sed -i 's#<\([/]\?\)\(if\|unless\|include\|arg\|property\|macro\|insert_block\)#<\1xacro:\2#g'
SUMMARY
========
PARAMETERS
* /joint_state_publisher/source_list: ['move_group/fake...
* /move_group/allow_trajectory_execution: True
* /move_group/capabilities:
* /move_group/controller_list: [{'joints': ['wai...
* /move_group/disable_capabilities:
* /move_group/gripper/planner_configs: ['SBL', 'EST', 'L...
* /move_group/initial: [{'pose': 'home_p...
* /move_group/jiggle_fraction: 0.05
* /move_group/manipulator/planner_configs: ['SBL', 'EST', 'L...
* /move_group/max_range: 5.0
* /move_group/max_safe_path_cost: 1
* /move_group/moveit_controller_manager: moveit_fake_contr...
* /move_group/moveit_manage_controllers: True
* /move_group/octomap_resolution: 0.025
* /move_group/planner_configs/BFMT/balanced: 0
* /move_group/planner_configs/BFMT/cache_cc: 1
* /move_group/planner_configs/BFMT/extended_fmt: 1
* /move_group/planner_configs/BFMT/heuristics: 1
* /move_group/planner_configs/BFMT/nearest_k: 1
* /move_group/planner_configs/BFMT/num_samples: 1000
* /move_group/planner_configs/BFMT/optimality: 1
* /move_group/planner_configs/BFMT/radius_multiplier: 1.0
* /move_group/planner_configs/BFMT/type: geometric::BFMT
* /move_group/planner_configs/BKPIECE/border_fraction: 0.9
* /move_group/planner_configs/BKPIECE/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/BKPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/BKPIECE/range: 0.0
* /move_group/planner_configs/BKPIECE/type: geometric::BKPIECE
* /move_group/planner_configs/BiEST/range: 0.0
* /move_group/planner_configs/BiEST/type: geometric::BiEST
* /move_group/planner_configs/BiTRRT/cost_threshold: 1e300
* /move_group/planner_configs/BiTRRT/frountier_node_ratio: 0.1
* /move_group/planner_configs/BiTRRT/frountier_threshold: 0.0
* /move_group/planner_configs/BiTRRT/init_temperature: 100
* /move_group/planner_configs/BiTRRT/range: 0.0
* /move_group/planner_configs/BiTRRT/temp_change_factor: 0.1
* /move_group/planner_configs/BiTRRT/type: geometric::BiTRRT
* /move_group/planner_configs/EST/goal_bias: 0.05
* /move_group/planner_configs/EST/range: 0.0
* /move_group/planner_configs/EST/type: geometric::EST
* /move_group/planner_configs/FMT/cache_cc: 1
* /move_group/planner_configs/FMT/extended_fmt: 1
* /move_group/planner_configs/FMT/heuristics: 0
* /move_group/planner_configs/FMT/nearest_k: 1
* /move_group/planner_configs ...
I have not used MoveIt for a while, but the message ":Fake execution of trajectory" sounds like a problem. It is telling you that no commands will be sent to the hardware. My guess is that you have used a "trajectory controller" node which does not know about your hardware, or maybe you have set a config parameter which tells it to not send any commands to the hardware.
Also, make sure you pass the correct arguments to group.execute() so that it waits for the trajectory to fully execute.
The "fake execution" message just means that
demo.launchwas used with MoveIt's fake controllers, and they executed the trajectory successfully. That's not a problem.I don't understand the question. Is the pose and orientation reachable for the robot? How are you obtaining it? What are you visualizing successfully and what is the problem? Which code is succeeding and which code is failing?
Is the pose and orientation reachable for the robot? Yes the Pose and orientation was reachable,as i had checked it joint statepublisher gui. How are you obtaining it? Using setRandompose method i had Obtained the valid reachable pose and set is as the target pose. What are you visualizing successfully and what is the problem? In the RVIZ under Display-> Motion Planning -> Planned Path -> link -> end effector link(in my case 'yaw') i am able to visualize the target pose updating on the pose and orientation as expected, but the robot is not moving. Which code is succeeding and which code is failing? While using 'settargetpose' method i always getting "ABORTED.No Motion Plan Found or Warn ABORTED.No motion Plan found", Errors. But while using 'setApproximateJointValueTarget' method i am getting above mentioned errors in my question and value changing in Rviz's Display-> Motion Planning ...(more)
There is no function called "settargetpose" in your question, nor do you specify the input parameters you pass to it. I don't know how to reproduce your problem. Most likely you're not setting the goal correctly, or setting two goals at the same time. But there's no way to tell without the necessary information, and detailed description of what you're doing. Please update your original post with it.
Also, is your end effector link called "yaw"? This is all difficult to understand. Please use a screenshot to describe what you're doing in more detail.
Sorry it is setPoseTarget, the command i had tried is group.setPoseTarget(target_pose); along with group.move();. Also tried with group.setPoseTarget(target_pose, "yaw");. I have not setting 2 pose goal at the same time,i had tried both setPoseTarget and setApproximateJointValueTarget seperately. Since the setPosetarget does not produce motion plan i had removed it from the code.
Yes my end effectoe link name is "yaw". Sure i will update some screen shot in the original question.
Please don't screenshot terminal outputs, they are not searchable. Paste the text into your question.
Your motion plan is succeeding. Your question text and your code seem to be contradicting each other. You say you use "the same pose from setRandomPose", but I don't know how you obtained that pose, and if your robot can really reach that position. Try printing the result of getJointValueTarget, since you're attempting to set a joint target with the function
setApproximateJointValueTarget, and not a pose target.Sure ,i had updated the question with jointValue Target, and i had removed the setrandompose in program,because i had just used it for understanding and troubleshooting.
"I don't know how you obtained that pose" - I am trying to directly use the grasping object's pose as the target_pose.
Is the target_pose given to setPoseTarget and SetApproximateJointValueTarget are different? What i had inputted in the setApproximateJointValueTarget is a target pose not a joint target for the link. If that's the case ,how can i get the jointValueTarget for the eef-link to reach the expected target pose, since i wont be able to reach the targetpose directly.
I formatted your code. Please do that yourself in the future.
What is printing the
Robot State,Joint transformsandLink posesin yourpick_placeprogram? Is the code you pasted the samepick_placeprogram you execute? It does not look like anything like that is printed in there.Both
setPoseTargetandsetApproximateJointValueTargettake a PoseStamped as input, but the former sets the pose as a goal for the planning problem, and the latter solves the IK and then sets the IK result (a joint configuration) as the goal of the planning problem. See the documentation.I am still not sure if your target pose is reachable, and I still don't understand how you obtained it, and if you made a mistake during that process. I also don't understand why the start of your post says you get an "ABORTED" error, but your terminal output says "SUCCEEDED".
Thanks For taking your time in formatting and commenting for my question.I had tried to fomat it ,it looks fine in the preview but after posting it looks somewhat misalighned.
What is printing the Robot State, Joint transforms and Link poses in your pick_place program? It is output of "getJointValueTarget" after motion planning.I had added it in the Program now. The target_pose is as i previously mentioned ,the grasping_object(object to pick) it is locate at(-0.74, 0.0, 0.35) Orientation(0, 0, 0, 1). I had checked the reachability by jogging the robot to that pose using Joint_state_publisher_gui.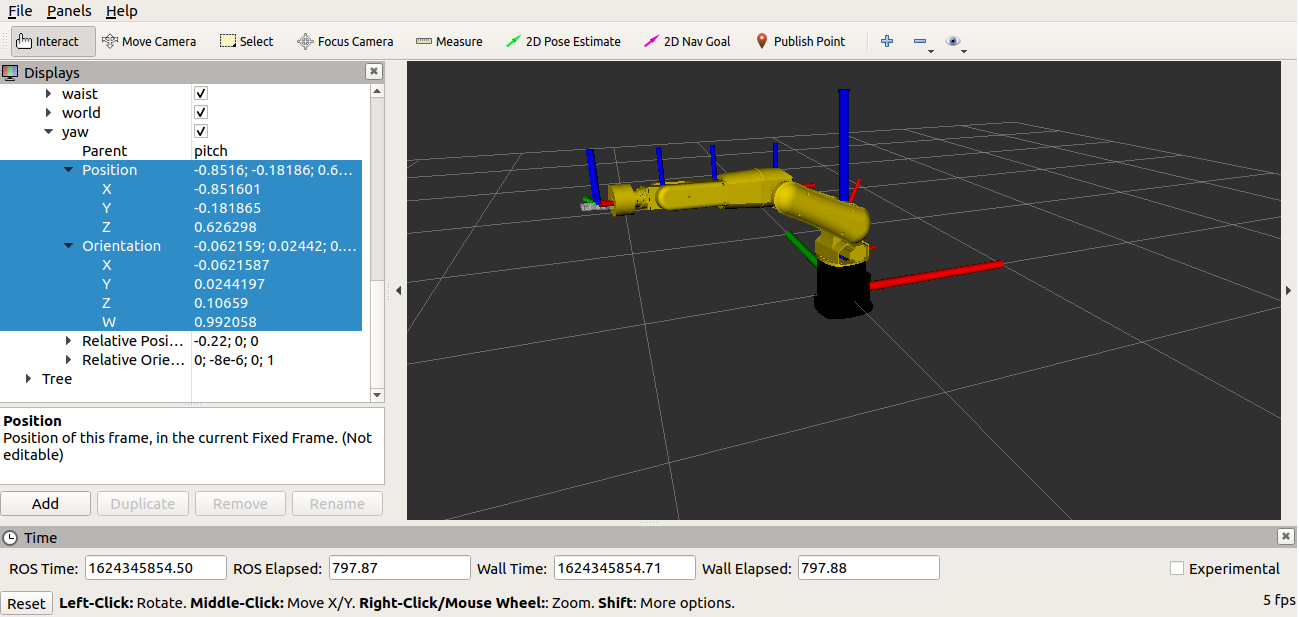 .
.
And "ABORTED" message i am getting only when i use group.move(); command and not when using "SetApproximateJointValueTarget".
Objective : The current objective is to reach the Grasping object at this pose (-0.74, 0.0, 0.35) Orientation(0, 0, 0, 1).
The XYZ position you show in your screenshot is [-0.85, -0.18, 0.62]. But let's assume that your robot can reach [-0.74, 0.0, 0.35] as well.
In that case your post apparently only contains code that works. Please post the actual code that is giving you problems and the error it produces.
This is the actual code ,those are the terminal outputs i am getting.No change.
Is there any more information could i provide?
Your question says that your terminal output is "ABORTED.No Motion Plan Found or Warn ABORTED."
The terminal output you posted does not say that, it says "Execution completed: SUCCEEDED".
Pls read my previous comment completely.
And "ABORTED" message i am getting only when i use setPoseTarget with group.move(); command and not when using "SetApproximateJointValueTarget".
So i am not using setPoseTarget with group.move(); in my program
I see no reason for this behavior, I cannot reproduce it and the code you showed works. I cannot help further if you don't add the actual code that is causing your issue.
Please update the whole question and not only sections, so there is less guesswork.
This is where i stuck. I am not able to move further in this application. There is no other code. Previously i had not modified program in the question some of the changes i had tested .But now The code on my question ,that is the actual code.
I can only repeat: the code in your question produces executes successfully. You say that if you change that code in a certain way, you run into problems. I can only assume that you are not implementing those changes correctly, and the error is in a part that you only described in words, not in code.
I cannot reproduce your problem, so I cannot help you further. You need to supply the necessary details and document your problem sufficiently.
Yes you are correct. But the problem is this point the code in your question produces executes successfully. .Error information is a support information ,when i tried with another possibility.Pls not focus on error. Also as far as i am concerned ,i gave enough information. Is there any information i had missed ,pls point out.I'll try to include.
Sorry, I can't understand what you're trying to say. As I said, there is not enough information to reproduce your problem, so I cannot help you. I don't know how to be clearer than that.
You can try investigating the issues that I previously mentioned to be likely causes for your error. Don't forget to answer your question if you find the solution. Thanks.
Fine Thanks for the response.