
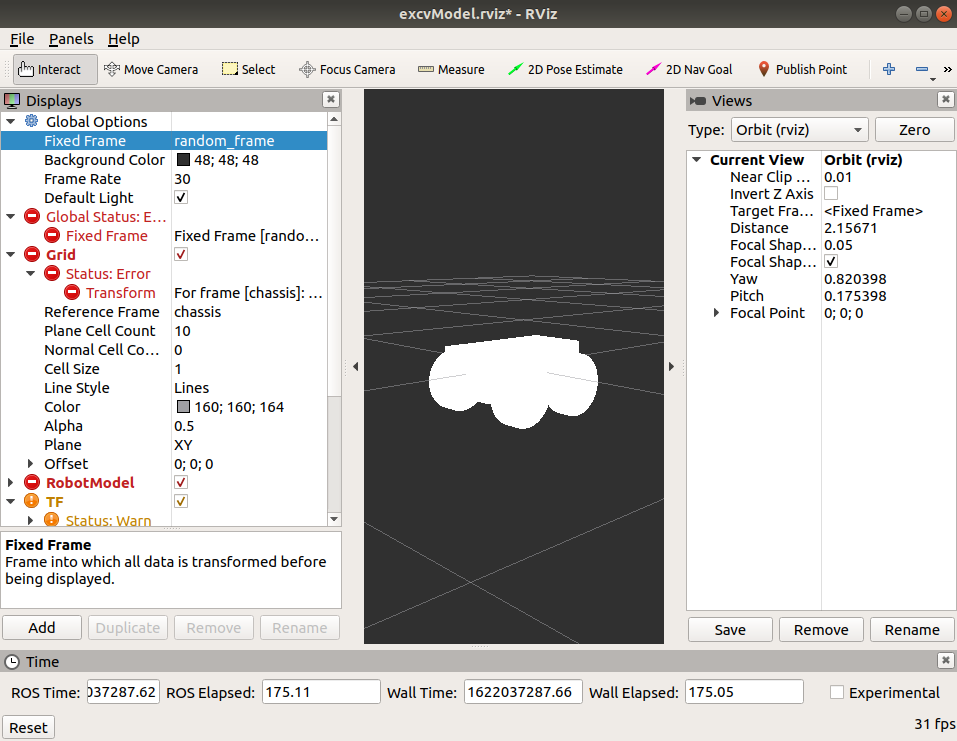
RVIZ: URDF Model disappears when loaded

I'm trying to load a simple urdf model into rviz. However, when rviz loads, the model is there for a split second, then disappears. All the status read ok, and rviz shows no problems. I can make the model appear, but only if I change the fixed frame to something non-existent, which then produces many issues. The terminal ready no issues either. I've already tried a common solution to export LC_NUMERIC to en_US.UTF-8, but this doesn't fix the issue.
I'm running ROS Melodic on Ubuntu 18.04.5 LTS through a Virtualbox VM on my Lenovo ideapad 330S (Windows 10).
RVIZ Config File:
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Status1
- /RobotModel1/Links1
- /TF1
Splitter Ratio: 0.5
Tree Height: 416
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Preferences:
PromptSaveOnExit: true
Toolbars:
toolButtonStyle: 2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed_Frame>
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
back_left:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
back_right:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
chassis:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
front_left:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
front_right:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: rviz/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
back_left:
Value: true
back_right:
Value: true
base_link:
Value: true
chassis:
Value: true
front_left:
Value: true
front_right:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
base_link:
chassis:
back_left:
{}
back_right:
{}
front_left:
{}
front_right:
{}
Update Interval: 0
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: chassis
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Theta std deviation: 0.2617993950843811
Topic: /initialpose
X std deviation: 0.5
Y std deviation: 0.5
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 2.1567115783691406
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X ...add a comment
