
Does Robot Axis arrow affect in final output?
Hello there,
Does this blue, green, and red arrow of x,y,z affect output? For example, I am building a package in moveit on the top of this urdf and then I integrate real robot. Both functions will be the same?
Should all link directions be the same or last tool_link should be the same as real robot?
________ Updated
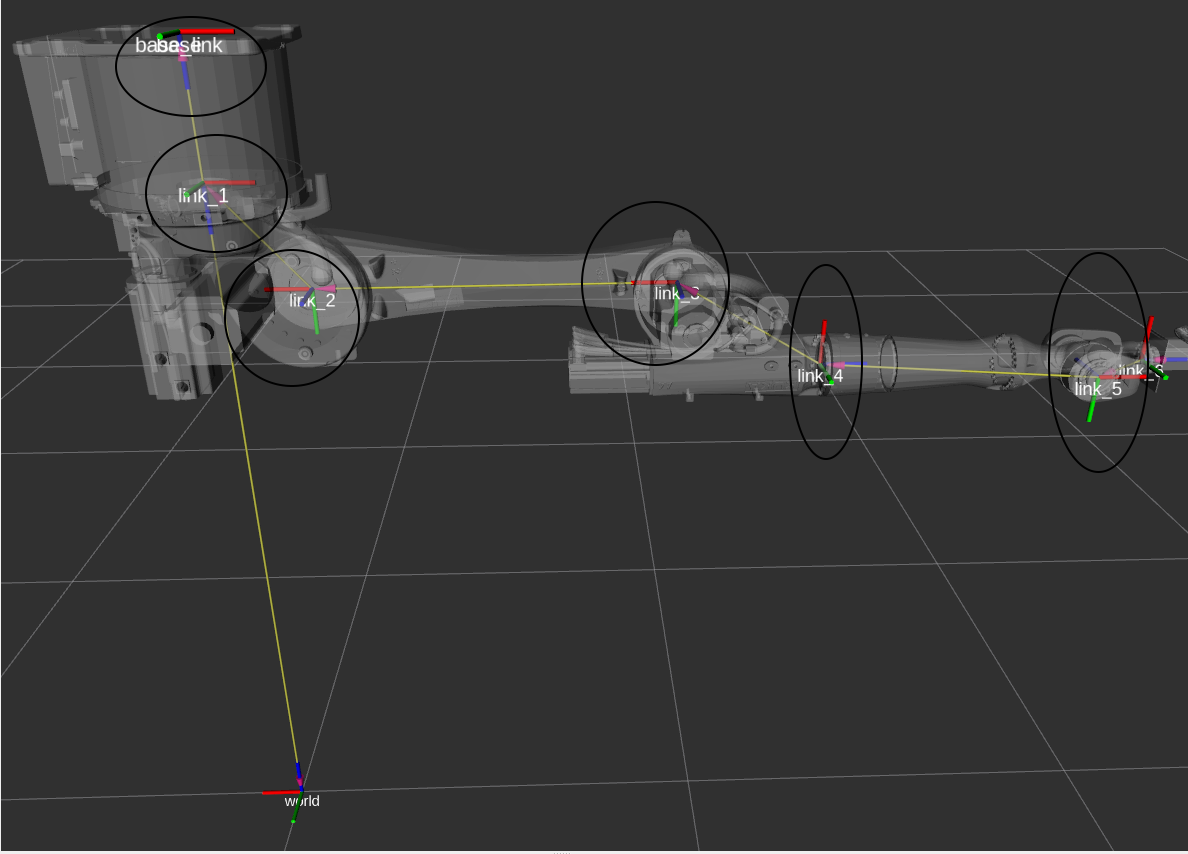
Over here all the links arrows Red, Blue, and Green are pointing in different directions on the other side in Kuka experimental official library is pointing towards the same direction except the tool point.
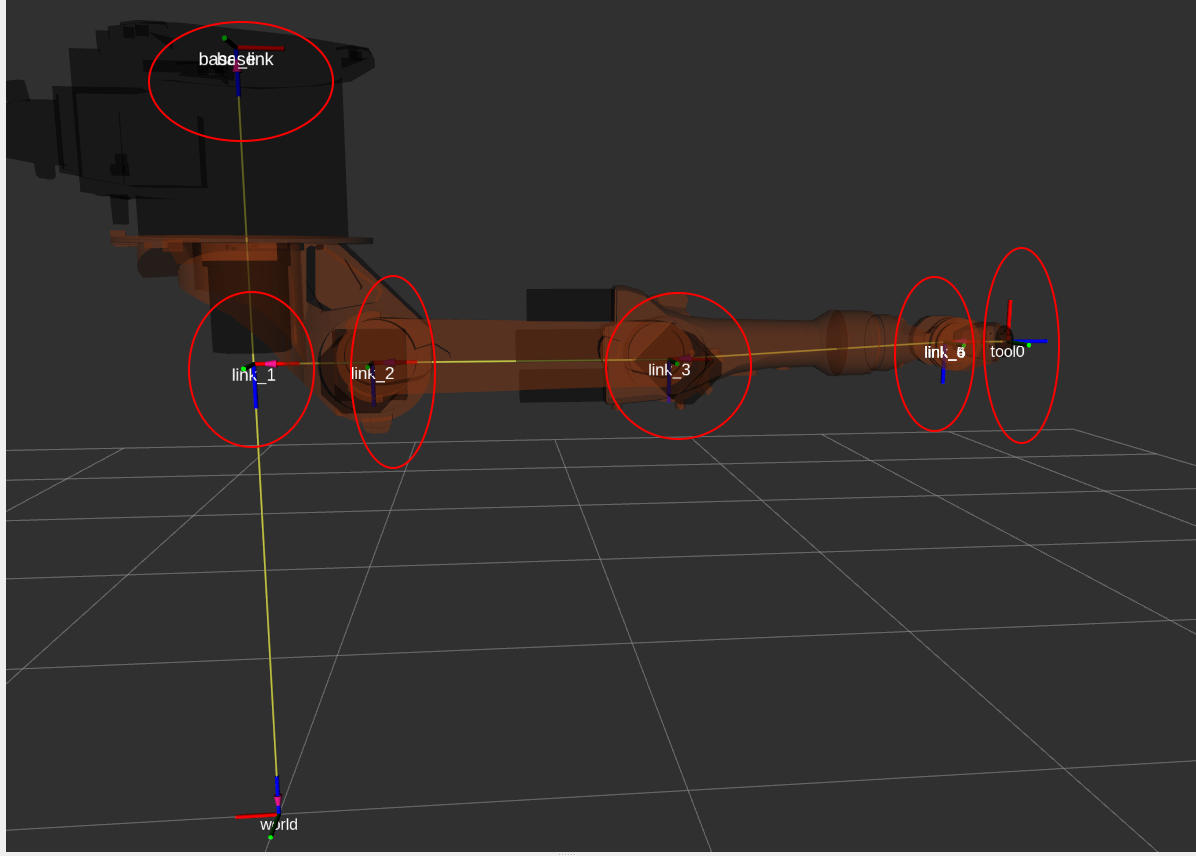
So, I have a question that if I give my robot simulator to go in a particular x,y,z position the same trajectory will be followed by my real robot? Or due to this issue, my robot may mislead and end up with different results?
Yes, My question does this link orientation affect the resulte?
Thanks again,

Are you asking whether the
link/frame orientation of intermediatelinks affects the orientation of the finallinkin the chain?