What robot model are you using? Your real robot and your virtual robot should be the same. If you are using a different robot, then your results may differ.
set up a package to connect with a KUKA KR180 R2900 via RSI with KRC4
It is essential to check the moments, and rotation is perfect. In some cases, the rotation of the real robot and your URDF robot may differ. Moreover, you also need to check the angle of moments of each axis makes it the same as Kuka real robot. You can check by importing the URDF file to RVIZ and check each axis working.
You can follow these steps to check links:
- https://github.com/ros/urdf_tutorial Clone It
- Copy display.launch file from urdf_tutorial/launch folder.
- In your launch folder, where you have built the package, create a launch file and paste display. Just change the URDF path and file name.
- Test the above details.
I could control the robot but the movement was so jerky.
Over here you can check your axis degree from the robot and from rviz and compare it whether it is different to not. If yes, then you need to fix your links from the URDF file.
You can check so: In your smart pad goto setting -> Display -> Actual position
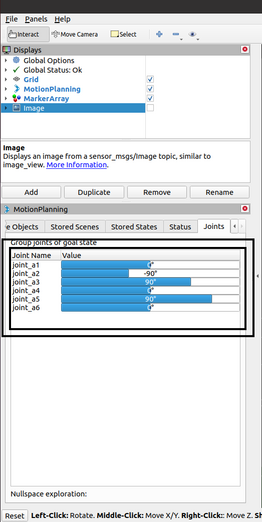
Compare this with your RVIZ motion planning -> Joints tab
Feel free to comment.

