
ZED odom dosen't recognize camera pitch

Hi,
I'm trying to implement a navigation with a zed2 and the following structure:
rtabmap publishing map-->odom
and
zed_node publishing odom-->base_link
For this purpose I disabled the publishing of the map frame inside the zed_wrapper. I start the camera with a launchfile like this:
<include unless="$(arg sim)" file="$(find zed_wrapper)/launch/zed2.launch">
<!-- Position respect to base frame (i.e. "base_link) -->
<arg name="cam_pos_x" default="0.51" />
<arg name="cam_pos_y" default="0.0" />
<arg name="cam_pos_z" default="0.53" />
<!-- Orientation respect to base frame (i.e. "base_link) -->
<arg name="cam_roll" default="0.0" />
<arg name="cam_pitch" default="0.349066" /> <!--20 degree in rad-->
<arg name="cam_yaw" default="0.0" />
</include>
When I'm looking at the frames in rviz, the camera frames and the map frame are at the correct positions, but the odom frame is tilted towards the sky. It seems that the odom part (which is calculated with IMU-data) calculates the odom frame like there is no predefined camera pitch.
Am I missing somehting? Is there a possibility to "tell" the odom part about the orientation of the camera?
Thanks for reading and thank you in advance for your replies :)
UPDATE:
It seems, that my awnser wasn't right, since now even without rtabmap I get twisted odom "planes" in rviz.
Following is the link to the picture in Google Drive:
https://drive.google.com/drive/folder... 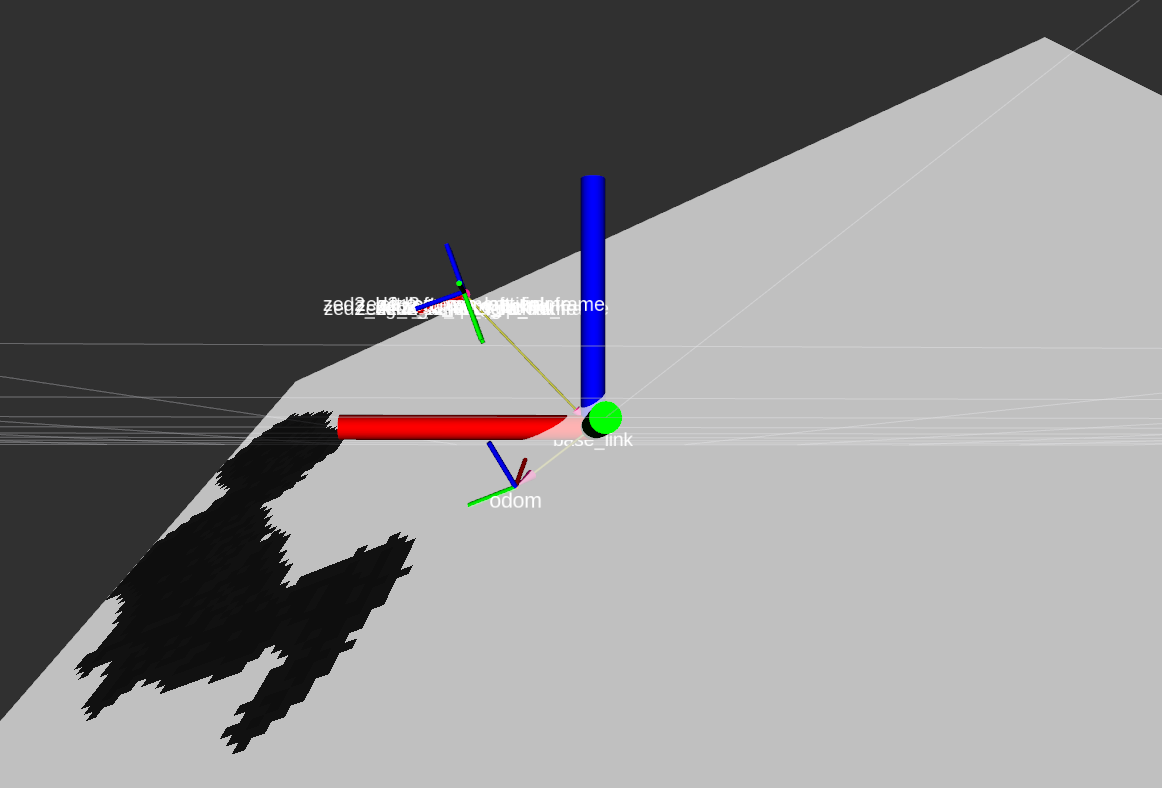

Is it that
cam_pitchshould be negative?By changing the
cam_pitchto negative, the whole base_link pitches in the opposite direction and the camera in the tf tree looks towards the sky.Can you link to a dropbox or google drive for the screeshotÉ? I could upload it in your question afterwards f it helps.
Here is the Link: https://drive.google.com/drive/folder... Thank you very much :)
Make sure to put your fixed frame in Global options of RVIZ in
odomframe (ormapframe if a map is created).Thanks for the tip, I already changed that.
Can you record a rosbag with only zed started?