
Minor joint difference between real-robot and move-it virtual robot
Hello there,
I have seen a minor difference between a move-it simulated robot and a real robot. Does anyone have an idea what's the issue over here and how to fix this?
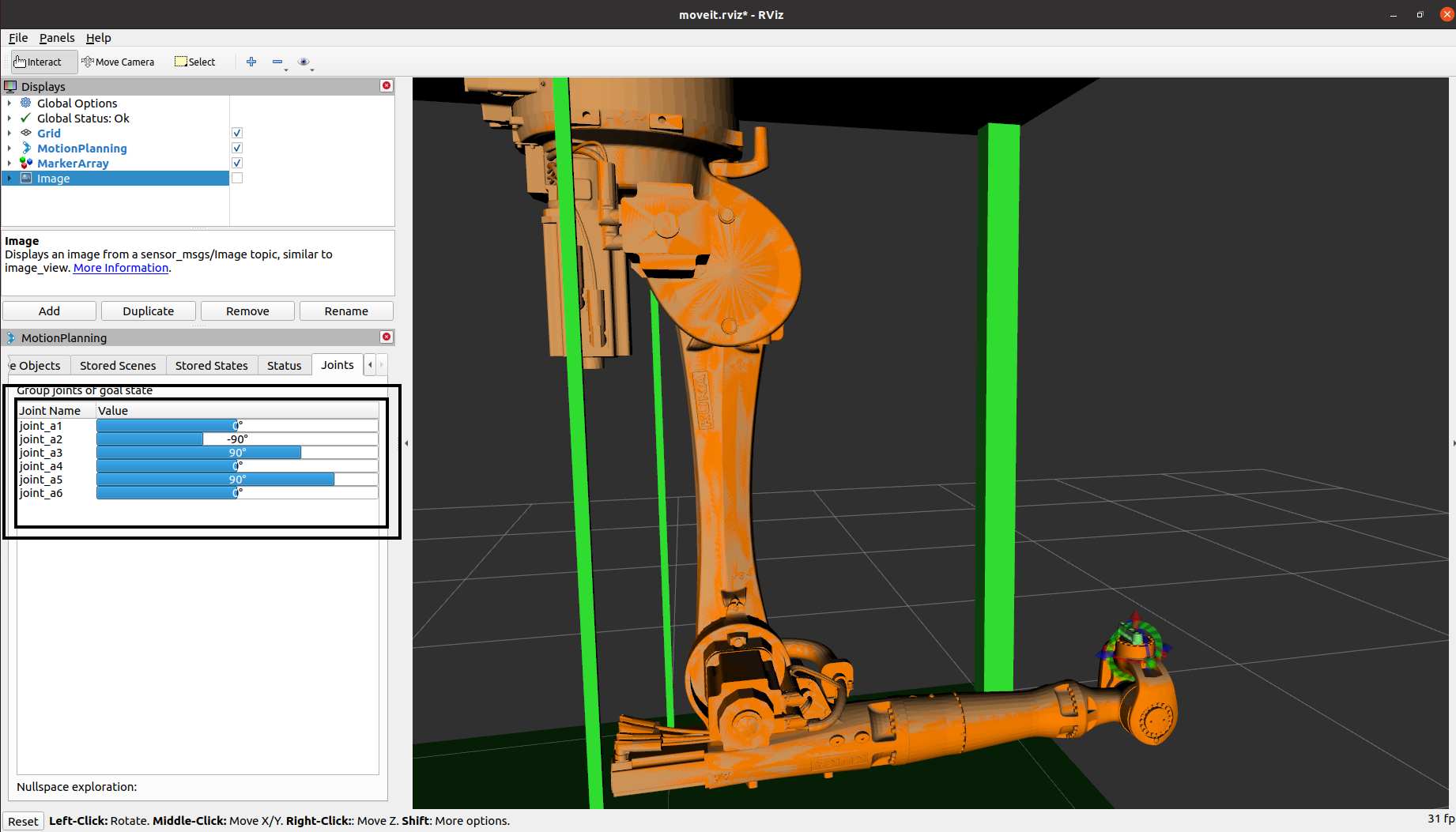
Rviz Moveit:
Kuka smart pad:
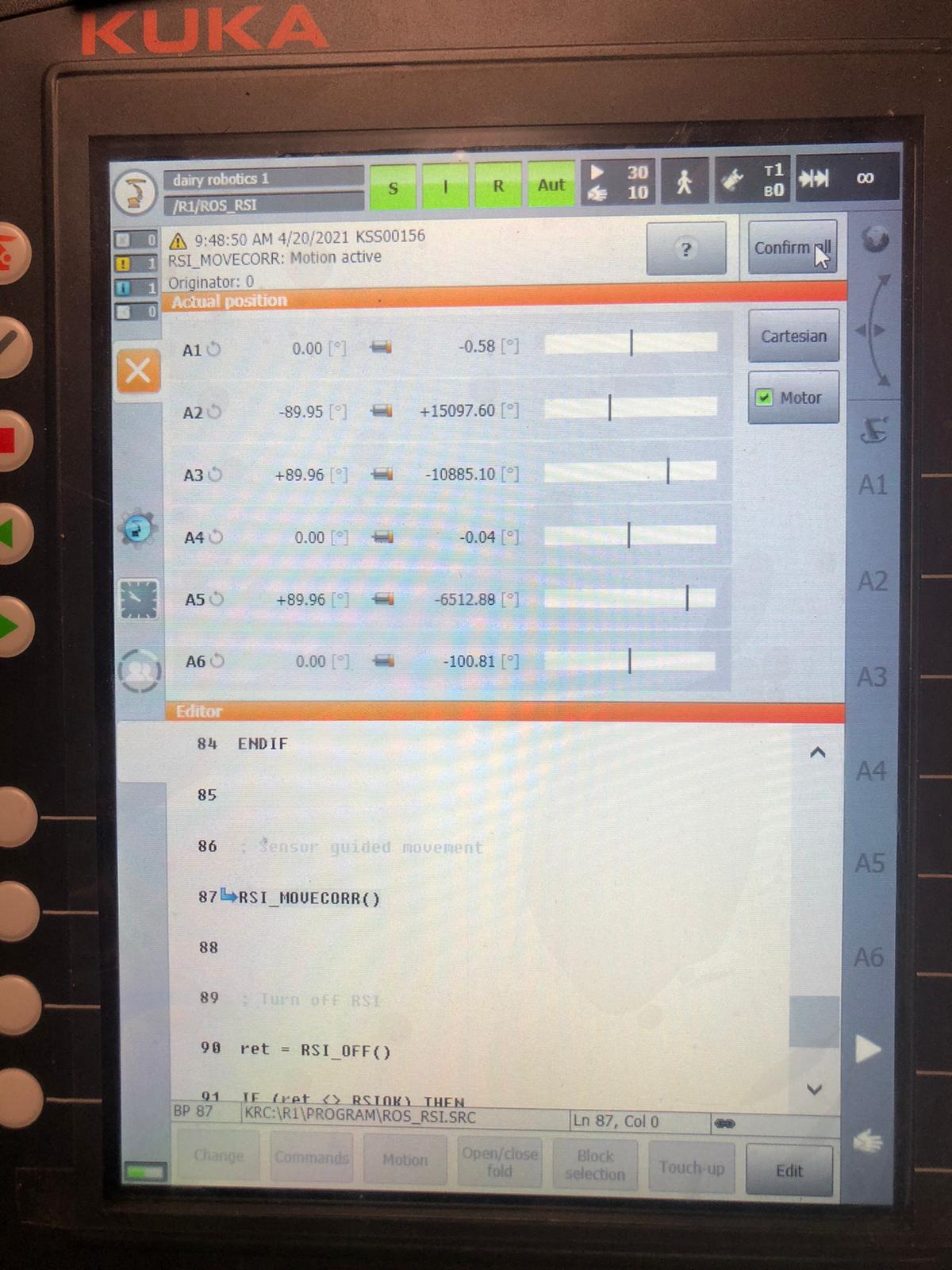
I think A1, A2 and A5 link has a slight different from rviz. How to fix this any idea or hint?
Thanks..

I would suggest to use Wireshark or a similar tool to take a look at the RSI datagrams sent our by the KR C4. Or
rostopic echothersi_xml_doctopic while the driver is running (although that would only show you the received RSI messages).That should show you what is being transmitted by the robot and where the difference might originate.
My guess is goal tolerances.
Thanks for the reply,
I will check by following these steps.