
Path planning

Hello everyone,
I'm trying to imititate the move_base .
Can I predict if there will be any collision before moving the robot .
For example: Check this screenshot, the global planner created a path but it's on the inflation layer of the costmap, the goal will never be attended, Is there any solution so I can predict this ? 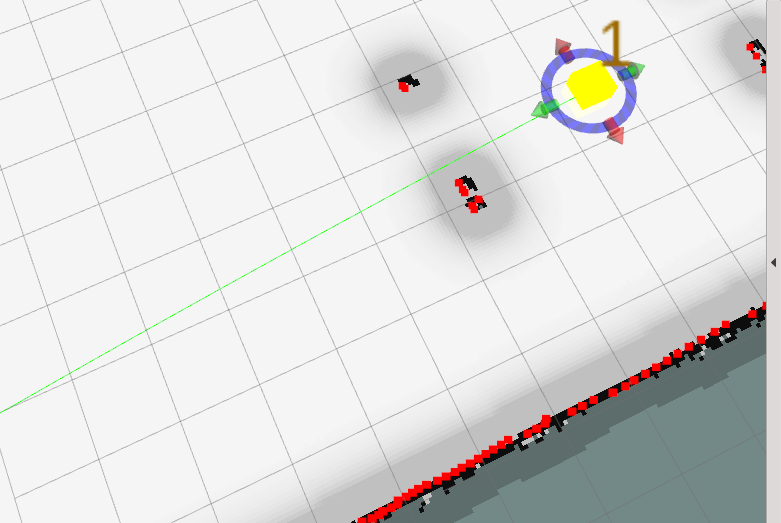
costmap params 


@hediimohamed in the future, please do not post answers that are not actually answers. If you need to add more information to your original question (for example, your costmap params), then edit your original question. I've removed your answer and added the content to your question. As another note, it would likely be more useful to see the parameters as actual text instead of an image -- for example the contents of your YAML file or a call to
rosparam get. Images are more difficult to search. Good luck getting your question answered!Well recieved Thank you, It won't happen again !