
Planning is not executing and the collision objects are not in the Moveit scene during executing a trajectoy.
When Im detecting collision object during the execution of the trajectory in the Moveit simulation I got the following error:
[ERROR] [1617248212.709207448]: RRTConnect: Unable to sample any valid states for goal tree
Also, the detected collision objects with the ZED Camera are not shown in the Moveit Scene
Here the code
using namespace sensor_msgs;
using namespace std;
void chatterCallback(const darknet_ros_3d_msgs::BoundingBoxes3d& boxes)
{
int counter_id = 0;
const std::string PLANNING_GROUP = "crane_control";
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
moveit::planning_interface::MoveGroupInterface move_group(PLANNING_GROUP);
moveit::planning_interface::MoveGroupInterface::Plan my_plan;
const std::string MoveGroupInterface = "robot_description";
namespace rvt = rviz_visual_tools;
moveit_visual_tools::MoveItVisualTools visual_tools("panda_link0");
visual_tools.deleteAllMarkers();
Eigen::Affine3d text_pose = Eigen::Affine3d::Identity();
text_pose.translation().z() = 1.75;
visual_tools.publishText(text_pose, "MoveGroupInterface Demo", rvt::WHITE, rvt::XLARGE);
visual_tools.trigger();
// Planning to a Pose goal
geometry_msgs::Pose target_pose1;
target_pose1.orientation.w = 1.0;
target_pose1.position.x = 0.28;
target_pose1.position.z = 0.5;
move_group.setPoseTarget(target_pose1);
bool success = (move_group.plan(my_plan) == moveit::planning_interface::MoveItErrorCode::SUCCESS);
move_group.move();
std::vector<std::string> object_ids;
moveit_msgs::CollisionObject collision_object;
collision_object.header.frame_id = "world";
collision_object.id = "BOX_";
std::vector<moveit_msgs::CollisionObject> collision_objects;
for(auto bb : boxes.bounding_boxes)
{
shape_msgs::SolidPrimitive primitive;
primitive.type = primitive.BOX;
primitive.dimensions.resize(3);
string str= to_string(counter_id++);
//Pose
geometry_msgs::Pose box_pose;
box_pose.position.x = abs ((bb.xmax + bb.xmin)/2);
box_pose.position.y = abs ((bb.ymax + bb.ymin)/2);
box_pose.position.z = abs ((bb.zmax + bb.zmin)/2)-10;
box_pose.orientation.x = 0;
box_pose.orientation.y = 0;
box_pose.orientation.z = 0;
box_pose.orientation.w = 1.0;
//Dimension
primitive.dimensions[0] = abs (bb.xmax - bb.xmin);
primitive.dimensions[1] = abs (bb.ymax - bb.ymin);
primitive.dimensions[2] = abs (bb.zmax - bb.zmin);
//Collision object
collision_object.primitives.push_back(primitive);
collision_object.primitive_poses.push_back(box_pose);
collision_objects.push_back(collision_object);
sleep(0.3);
}
collision_object.operation = collision_object.REMOVE;
object_ids.push_back(collision_object.id);
planning_scene_interface.removeCollisionObjects(object_ids);
sleep(0.5);
collision_object.operation = collision_object.ADD;
planning_scene_interface.applyCollisionObjects(collision_objects);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "cpp_subscriber");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("/darknet_ros_3d/bounding_boxes", 5, chatterCallback);
ros::spin();
}
Here the robot controller yaml from the config file
crane:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
joints:
- crane_rotation
- crane_linearX
- crane_linearZ
- crane_joint1
- crane_joint2
- crane_joint3
# Position Controllers ---------------------------------------
joint1_position_controller:
type: position_controllers/JointPositionController
joint: crane_rotation
# pid: {p: 1000.0, i: 1.0, d: 100.0}
joint2_position_controller:
type: position_controllers/JointPositionController
joint: crane_linearX
# pid: {p: 500.0, i: 1.0, d: 100.0}
joint3_position_controller:
type: position_controllers/JointPositionController
joint: crane_linearZ
# pid: {p: 500.0, i: 0.01, d: 10.0}
Here the RVIZ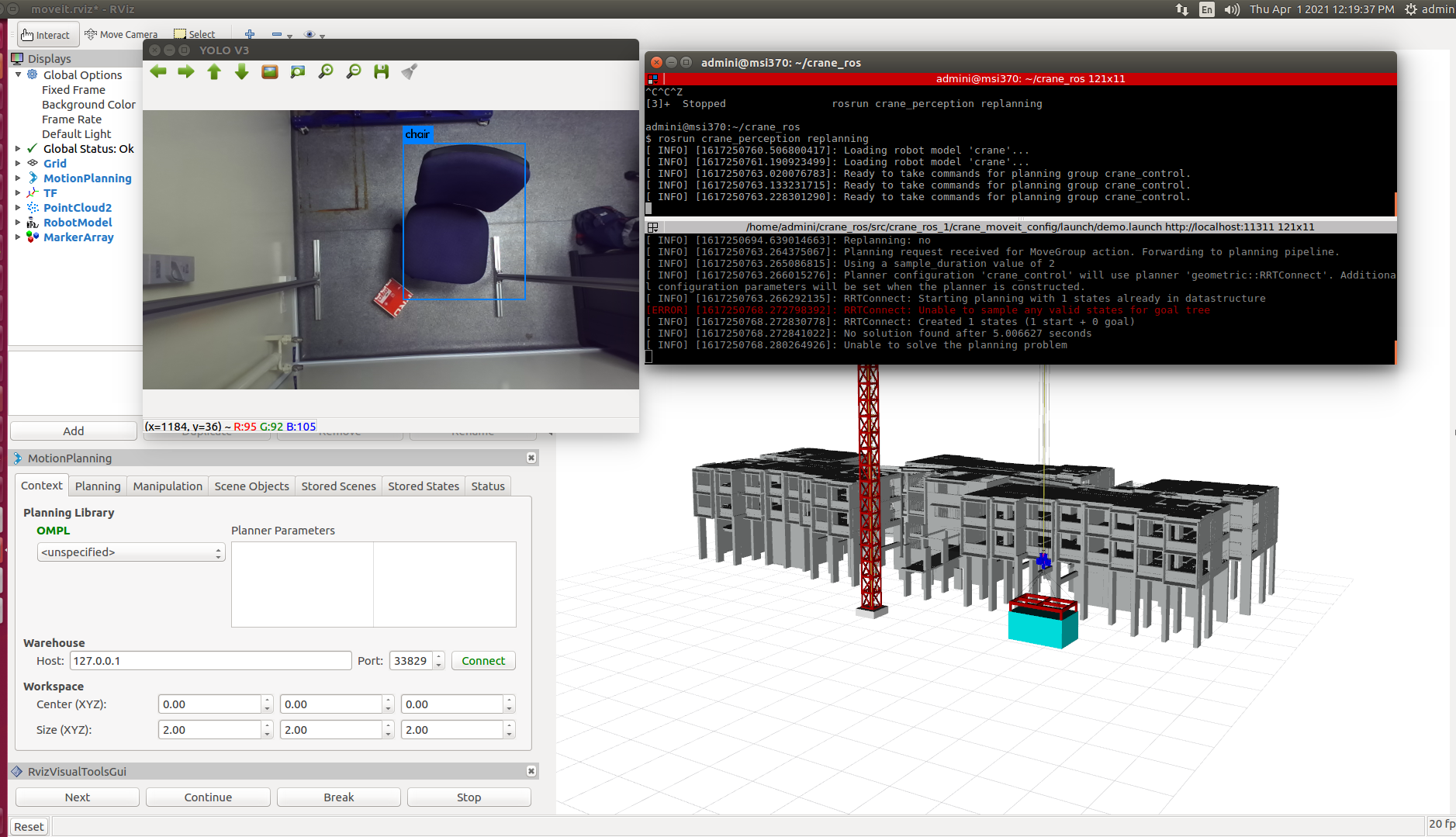
Any Help?
add a comment
