
TF topic needs many source
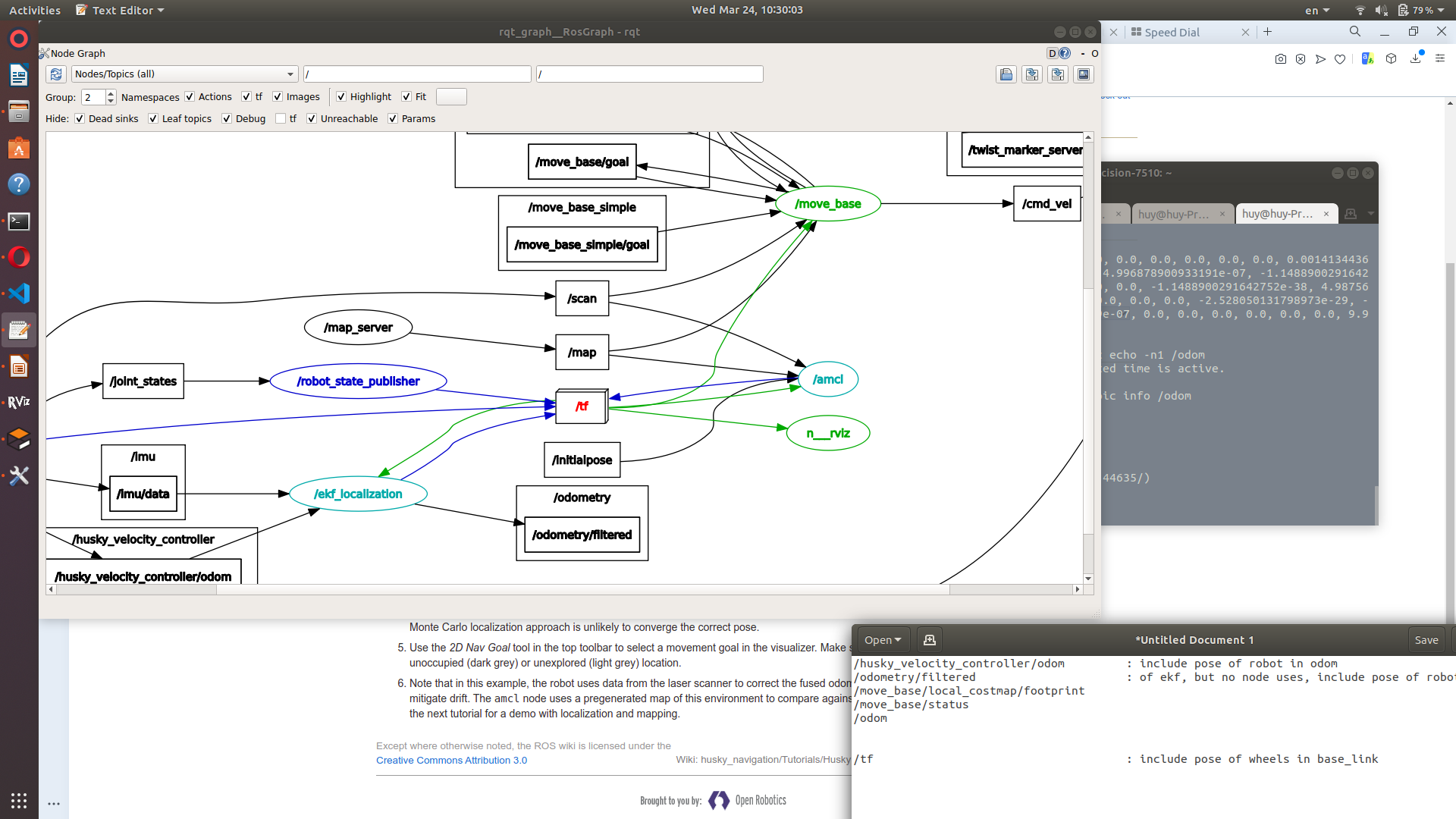
Hello everyone, i am running husky_navigation tutorial. In husky amcl demo lesion, husky amcl demo. I realize that there are 4 nodes that transmiss tf2_msgs/TFMessage to /tf topic. They are: ekf_localization, amcl, robot_state_publisher and gazebo. I wonder that whether the signals from 4 sources are the same ? And why tf need too many source like that ? In real project, can i mitigate any sources ?
 Thanks in advance!
Thanks in advance!
add a comment

