
Rviz2 does not get radar virtual CAN data - Lecture9 Autoware Course [closed]

Hi, I followed step-by-step the tutorial from Daniel (the written tutorial and video-class): https://www.youtube.com/watch?v=PcVIO...
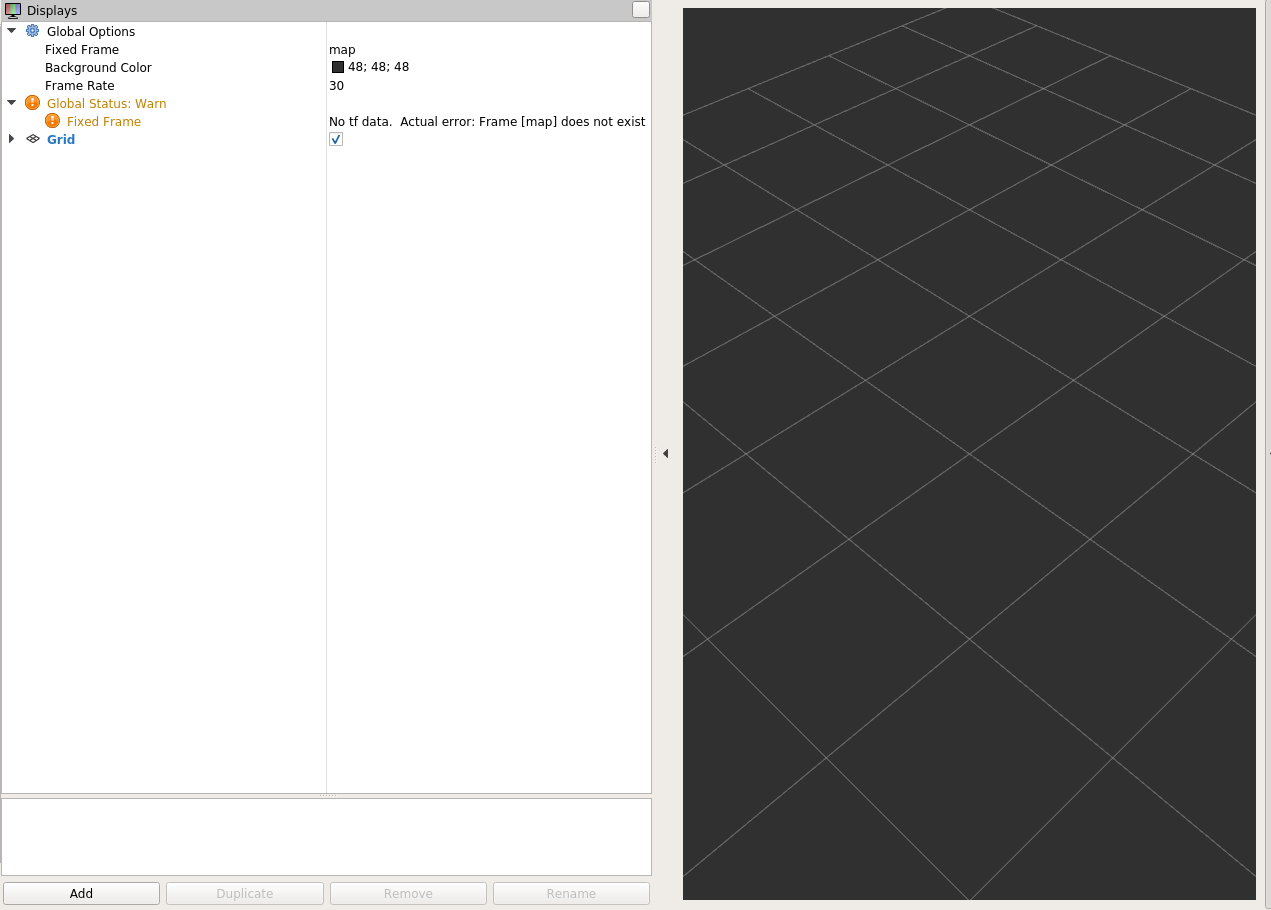
All the nodes were launched with success, and the virtual CAN was set and created. However when I open the rviz2 there is not radar_base link in Fixed Frames (Also any option to scroll down and find this link, just map as Fixed Frame).
It seems that rviz2 is not receiving info of the virtual CAN or the node that publish the raw CAN data into object list. There is some communication issue that I do not know what is.
The difference from my screen to solution terminal screen is the following messages marked within ** boded which I receive after launch the radar node and rviz2 (which in lecture tutorial does not appear):
output of launch ros2 node: $ros2 launch radar_conti_ars408 radar.launch.py
> [INFO] [launch]: All log files can be found below /home/autoware-ros2/.ros/log/2021-02-19-16-44-51-968889-ade-8186
[INFO] [launch]: Default logging verbosity is set to INFO
1613749492.281343 [0] ****ros2: using network interface wlp2s0 (udp/192.168.100.10) selected arbitrarily from: wlp2s0, docker0****
[INFO] [radar_conti_ars408_composition-1]: process started with pid [8197]
****[radar_conti_ars408_composition-1] 1613749492.319354 [0] radar_cont: using network interface wlp2s0 (udp/192.168.100.10) selected arbitrarily from: wlp2s0, docker0****
And after launch rviz2: $rviz2
****QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-autoware-ros2'
1613749566.381037 [0] rviz2: using network interface wlp2s0 (udp/192.168.100.10) selected arbitrarily from: wlp2s0, docker0****
[INFO] [rviz2]: Stereo is NOT SUPPORTED
[INFO] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[INFO] [rviz2]: Stereo is NOT SUPPORTED
This is the content of my .aderc file:
export ADE_DOCKER_RUN_ARGS="--cap-add=SYS_PTRACE -e RMW_IMPLEMENTATION=rmw_cyclonedds_cpp"
export ADE_GITLAB=gitlab.com
export ADE_REGISTRY=registry.gitlab.com
export ADE_IMAGES="
registry.gitlab.com/autowarefoundation/autoware.auto/autowareauto/ade:master
registry.gitlab.com/autowarefoundation/autoware.auto/autowareauto:master
I believe the error is regarding this message " rviz2: using network interface wlp2s0 (udp/192.168.100.10) selected arbitrarily from: wlp2s0, docker0" or this advertise: "*QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-autoware-ros2'" However I am not sure, and what file to change. How can fix this issue, and remove this "error"?
I am following this https://gitlab.com/autowarefoundation... to try to fix this issue, however I do not know how to expose the nvidia to /dev/nvidia0 ( I do not know how to check this). My docker is > 19.03 and container--toolkit is installed:
Output of nvidia-smi command:
NVIDIA-SMI 460.32.03 Driver Version: 460.32.03 CUDA Version: 11.2
ouptut of docker --version command:
Docker version 19.03.12, build 48a66213fe
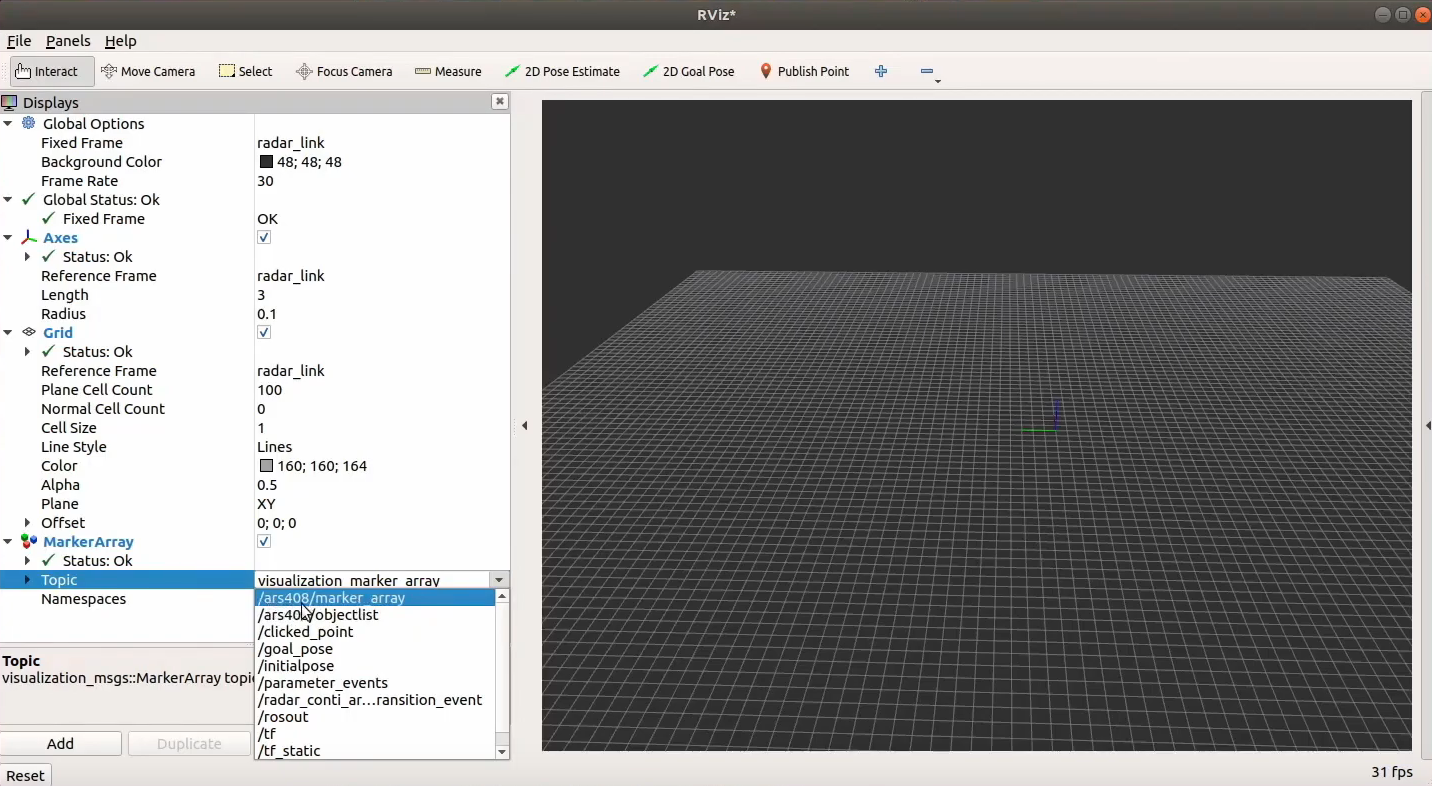
How rviz2 should open:
How it is currently opening:
Using the command: ip link show I got:the networks available:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN mode DEFAULT group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
2: enp3s0: <BROADCAST,MULTICAST> mtu 1500 qdisc noop state DOWN mode DEFAULT group default ...

I'm sorry, but I've closed your question. You've been a member of this board for about 2 years now, and have multiple questions posted and answered.
You should be aware by now of the request not to post screenshots of terminals, nor of code, or text editors.
It's all text, so if there are relevant parts, copy-paste them into your question and format them correctly (using the Preformatted Text button (the one with
101010on it)).If you edit your question and fix the terminal screenshots, we can re-open.
@gvdhoom I have re-edited the question according to your guidelines, could you please re-open it? Can I put pictures of rviz2 (how it should be and how it actually is) ?
Thanks in advance.
of course. RViz is a GUI program.