
Updating origin of local costmap when robot moves to a different floor
Hello,
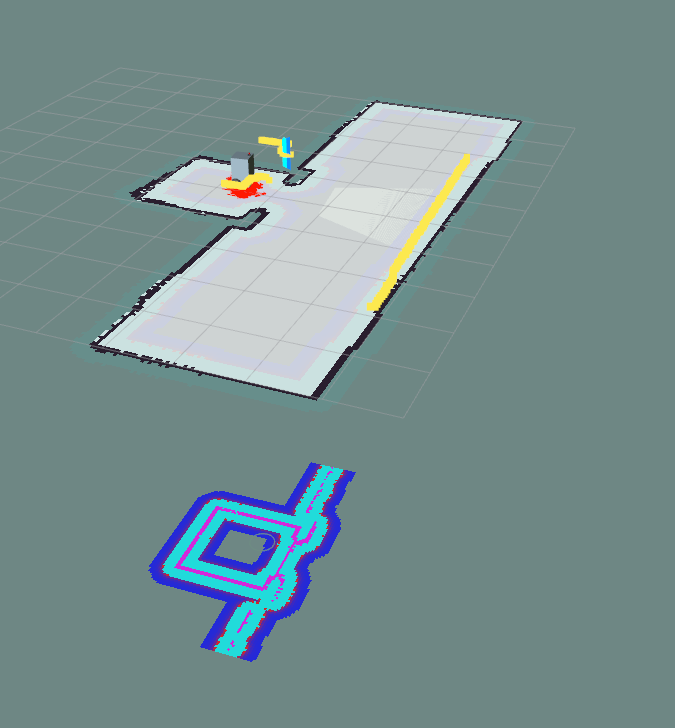
I am trying to get a robot to move through different floors. Currently I can change maps (killing and relaunching map_server) but the problem is the local costmap doesn't update when the robot moves to a different floor. I think it might be because the 'z' of origin of the local costmap stays at 0 even when my robot's 'z' changes. This leads to the costmap being not cleared. I have attached an image of how it looks in rviz. How can I get the costmap to clear or to get the costmap to follow the robot?
My global_frame for local_costmap_params is dbot/odom
add a comment
