
robot_localization tutorial with Turtlebot3 in ROS2 Foxy
Hello,
I am trying to make a simulation tutorial with Turtlebot3 waffle in the Turtlebot world that uses the robot_localization package.

I am using ROS2 Foxy.
The goal is to use dual ekf with navsat transform node in order to use GPS position. For now I am only trying to use a simple ekf fusion of wheel odometry and IMU.
However I believe the fusion is not working well. See results on the picture:
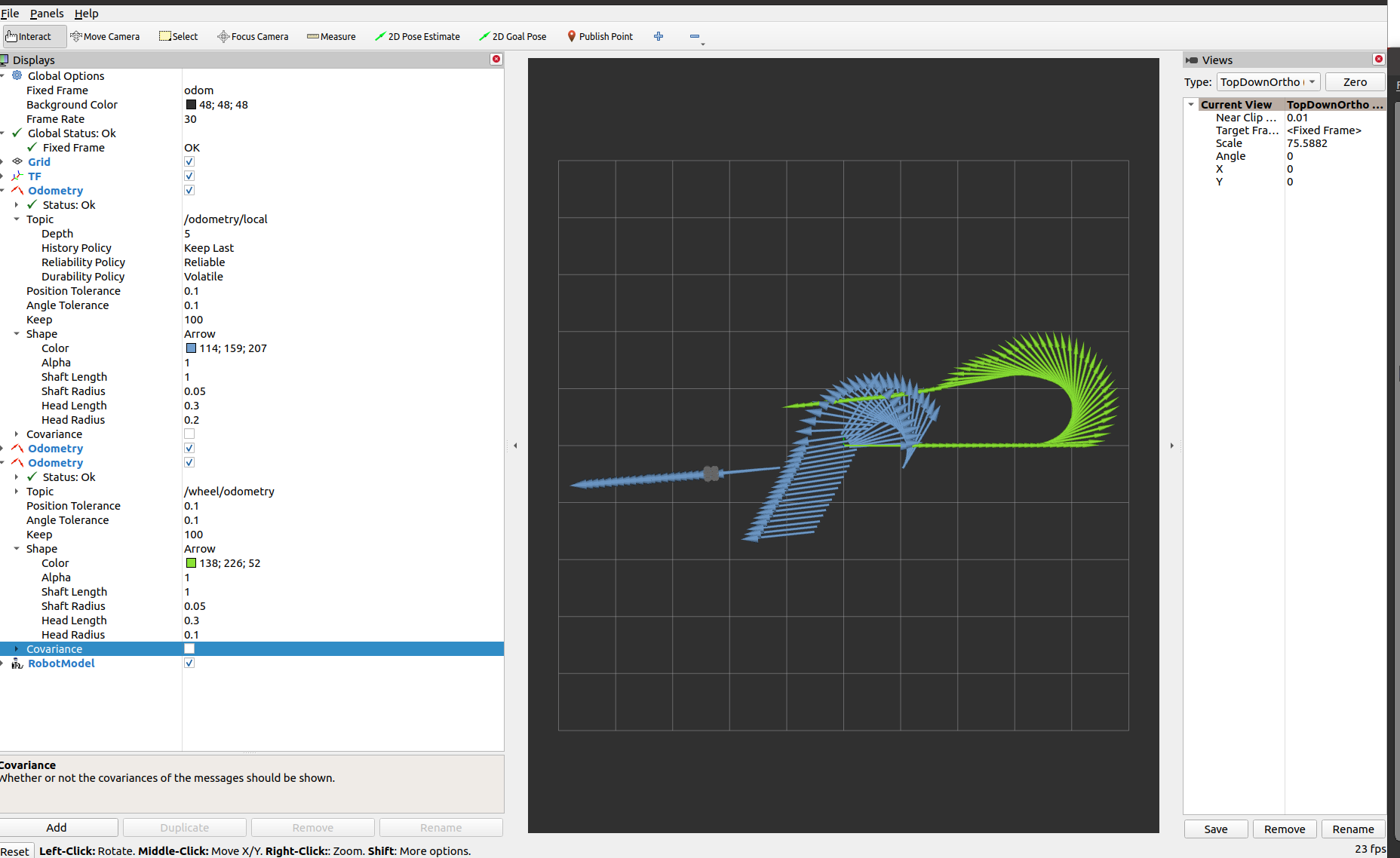
- In green is the pose given by the turtlebot3 diff drive wheel encoders in simulation.
- In blue is the pose given by the fusion of IMU and wheel odometry.
Could someone give me advice on how to properly tune the ekf parameter?
Please try my package(only first example for now), I hope the README is good enough : https://github.com/cocodmdr/turtlebot...
If I can make this simulation work, I would be pleased that it could help others start with robot_localization package.
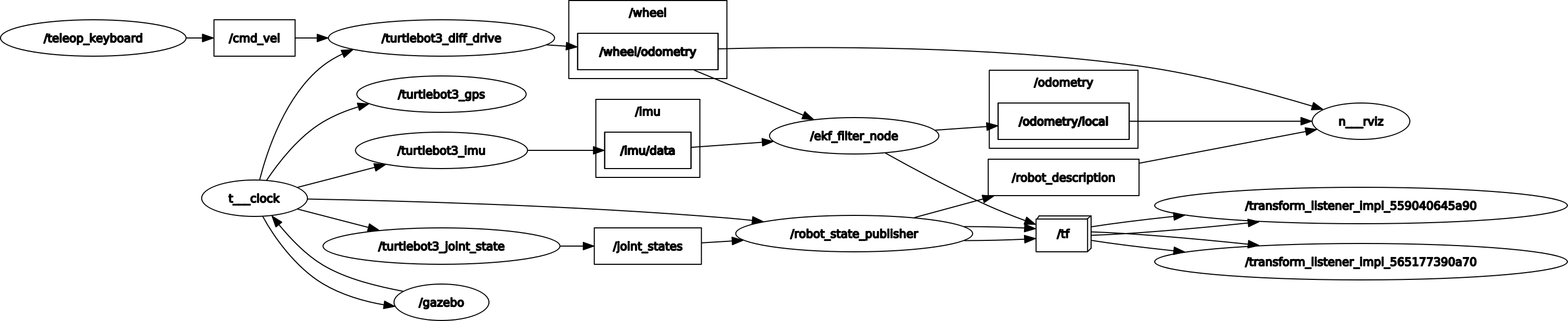
Here is the output of rqt_graph :
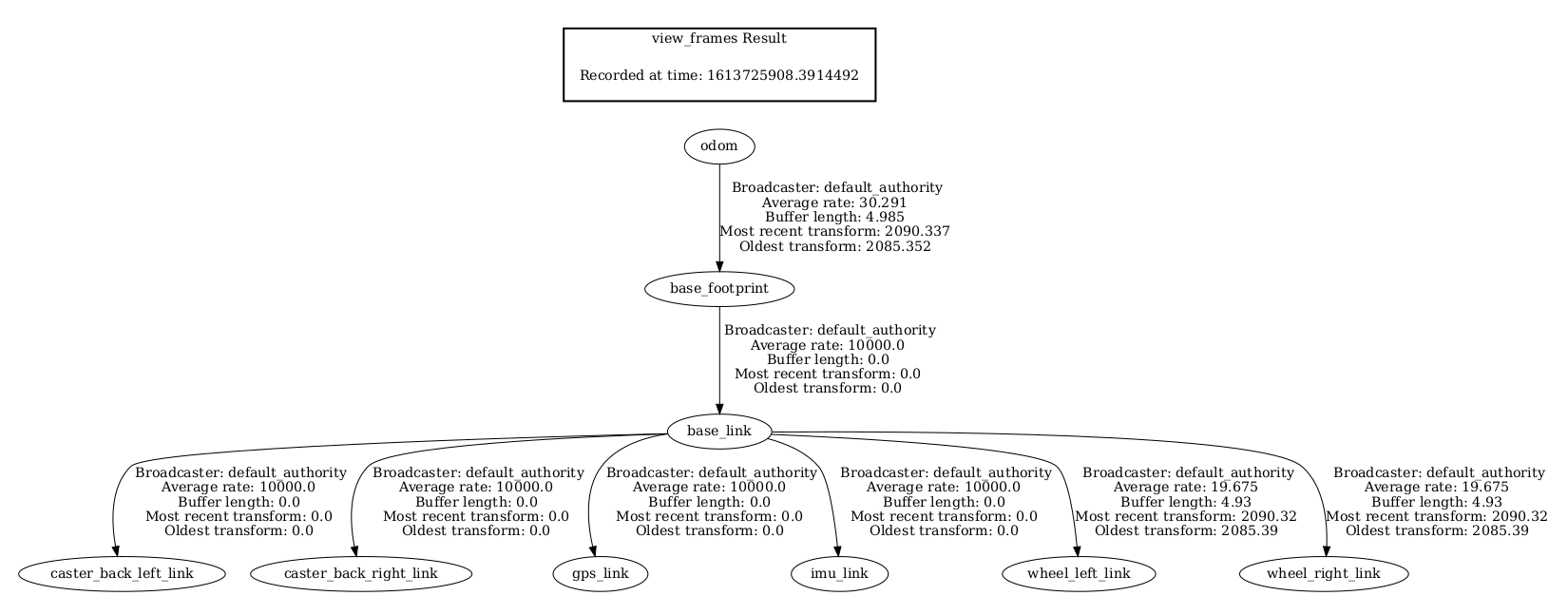
Here is my tf tree :
Here is my ekf.yaml parameter file:
ekf_filter_node:
ros__parameters:
frequency: 30.0
sensor_timeout: 0.1
two_d_mode: true
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
debug_out_file: /path/to/debug/file.txt
publish_tf: true
publish_acceleration: false
reset_on_time_jump: true
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_footprint # Defaults to "base_link" if unspecified
world_frame: odom # Defaults to the value of odom_frame if unspecified
odom0: wheel/odometry
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
# [x_pos , y_pos , z_pos,
# roll , pitch , yaw,
# x_vel , y_vel , z_vel,
# roll_vel, pitch_vel, yaw_vel,
# x_accel , y_accel , z_accel]
odom0_queue_size: 2
odom0_nodelay: false
odom0_differential: false
odom0_relative: false
odom0_pose_rejection_threshold: 5.0
odom0_twist_rejection_threshold: 1.0
imu0: imu/data
imu0_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]
imu0_nodelay: false
imu0_differential: false
imu0_relative: true
imu0_queue_size: 5
imu0_pose_rejection_threshold: 0.8 # Note the difference in parameter names
imu0_twist_rejection_threshold: 0.8 #
imu0_linear_acceleration_rejection_threshold: 0.8 #
imu0_remove_gravitational_acceleration: true
use_control: false
stamped_control: false
control_timeout: 0.2
control_config: [true, false, false, false, false, true]
acceleration_limits: [1.3, 0.0, 0.0, 0.0, 0.0, 3.4]
deceleration_limits: [1.3, 0.0, 0.0, 0.0, 0.0, 4.5]
acceleration_gains: [0.8, 0.0, 0.0, 0.0, 0.0, 0.9]
deceleration_gains: [1.0, 0.0, 0.0, 0.0, 0.0, 1.0]
process_noise_covariance: [0.05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.05, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.06, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.03, 0.0, 0.0, 0 ...
