
I want to attach my robot upside-down
Hey there,
I want to change the base position.
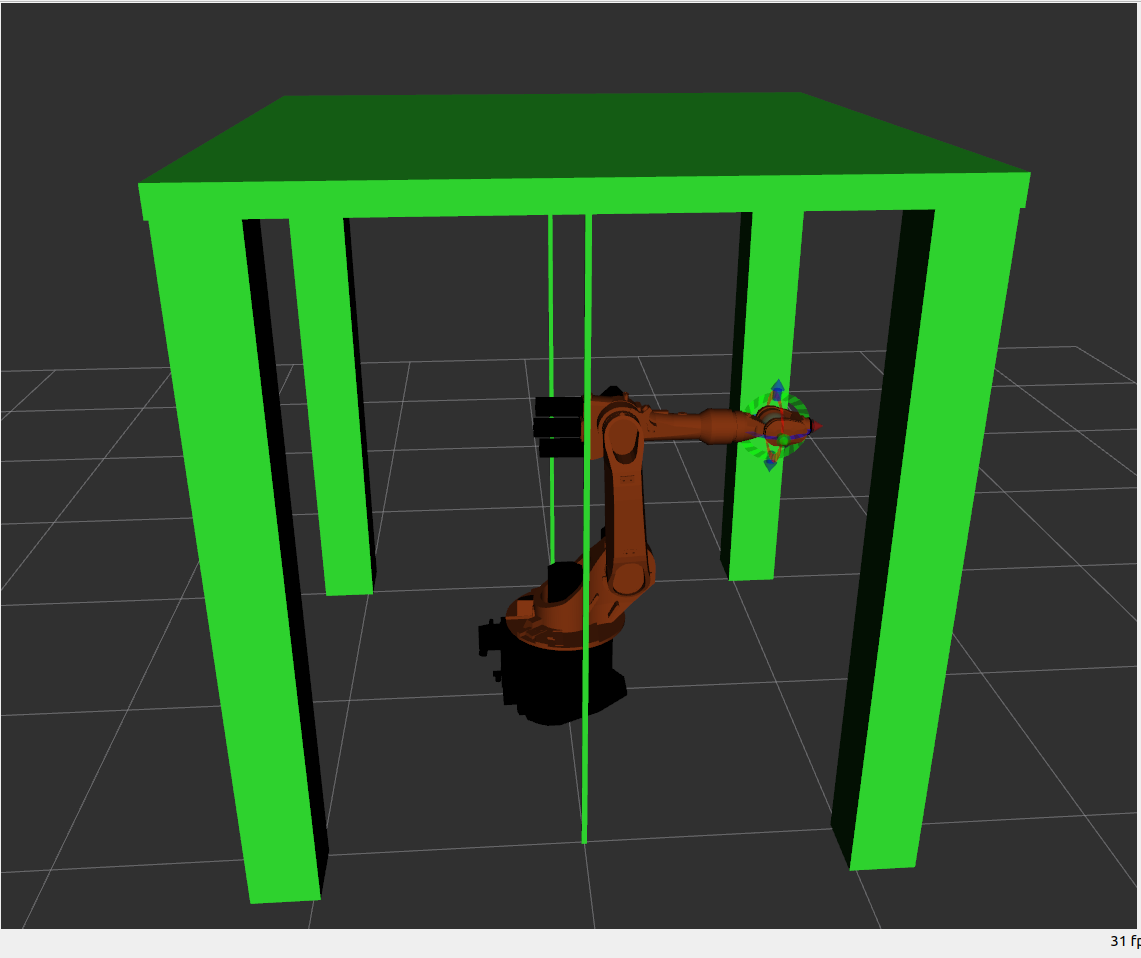
In this given example, I want to attach my robot upside facing towards down. I there any way to do it?
I have tried changing the urdf file, but the robot orientation and linking all joints 180 degrees was causing the problem. Any easy idea to achieve this type of result?
<?xml version="1.0" ?>
<!-- =================================================================================== -->
<!-- | This document was autogenerated by xacro from kr16_2.xacro | -->
<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED | -->
<!-- =================================================================================== -->
<!--Generates a urdf from the macro in kr16_2_macro.xacro -->
<robot name="kuka_kr16_2" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- LINKS -->
<!-- base link -->
<link name="base_link">
<inertial>
<origin rpy="3.14 0 0" xyz="0 0 2.35"/>
<mass value="2"/>
<inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/>
</inertial>
<visual>
<origin rpy="3.14 0 0" xyz="0 0 2.35"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/visual/base_link.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="3.14 0 0" xyz="0 0 2.35"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/collision/base_link.stl"/>
</geometry>
</collision>
</link>
<!-- link 1 (A1) -->
<link name="link_1">
<inertial>
<origin rpy="0 0 0" xyz="0 0 0"/>
<mass value="2"/>
<inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/visual/link_1.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/collision/link_1.stl"/>
</geometry>
</collision>
</link>
<!-- link 2 -->
<link name="link_2">
<inertial>
<origin rpy="0 0 0" xyz="0 0 0"/>
<mass value="2"/>
<inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/visual/link_2.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/collision/link_2.stl"/>
</geometry>
</collision>
</link>
<!-- link 3 -->
<link name="link_3">
<inertial>
<origin rpy="0 0 0" xyz="0 0 0"/>
<mass value="2"/>
<inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/visual/link_3.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://kuka_kr16_support/meshes/kr16_2/collision/link_3.stl ...
Please show how you changed the URDF file and what error you received.
Apart from the fact you're using a KUKA, this reads like a duplicate of #q321902.
If you agree, please close your question as such.
Edit: it might be good to change the title of your question to "I want to attach my robot upside-down". The current title asks about a possible solution, which is typically regarded as an xy-problem.
Please post updates by appending to in your original question text. Do not use comments for this.
Use the
editbutton/link under your original post to update it.I am sorry was not knowing that we can edit the original question post. I am not able to delete this comment. I am getting 10 minutes posting error.