wrong map produced during multi-robot map merging

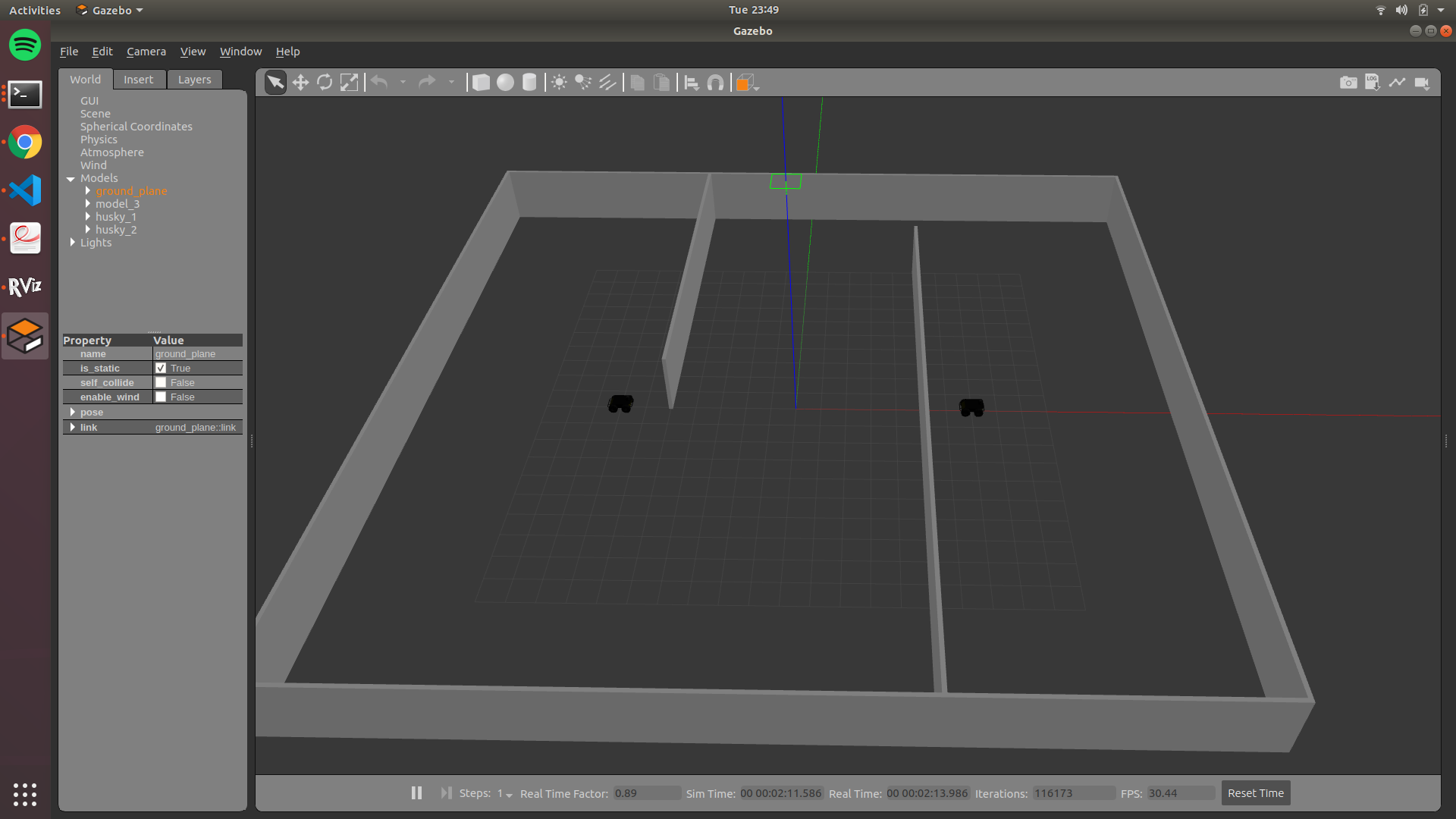
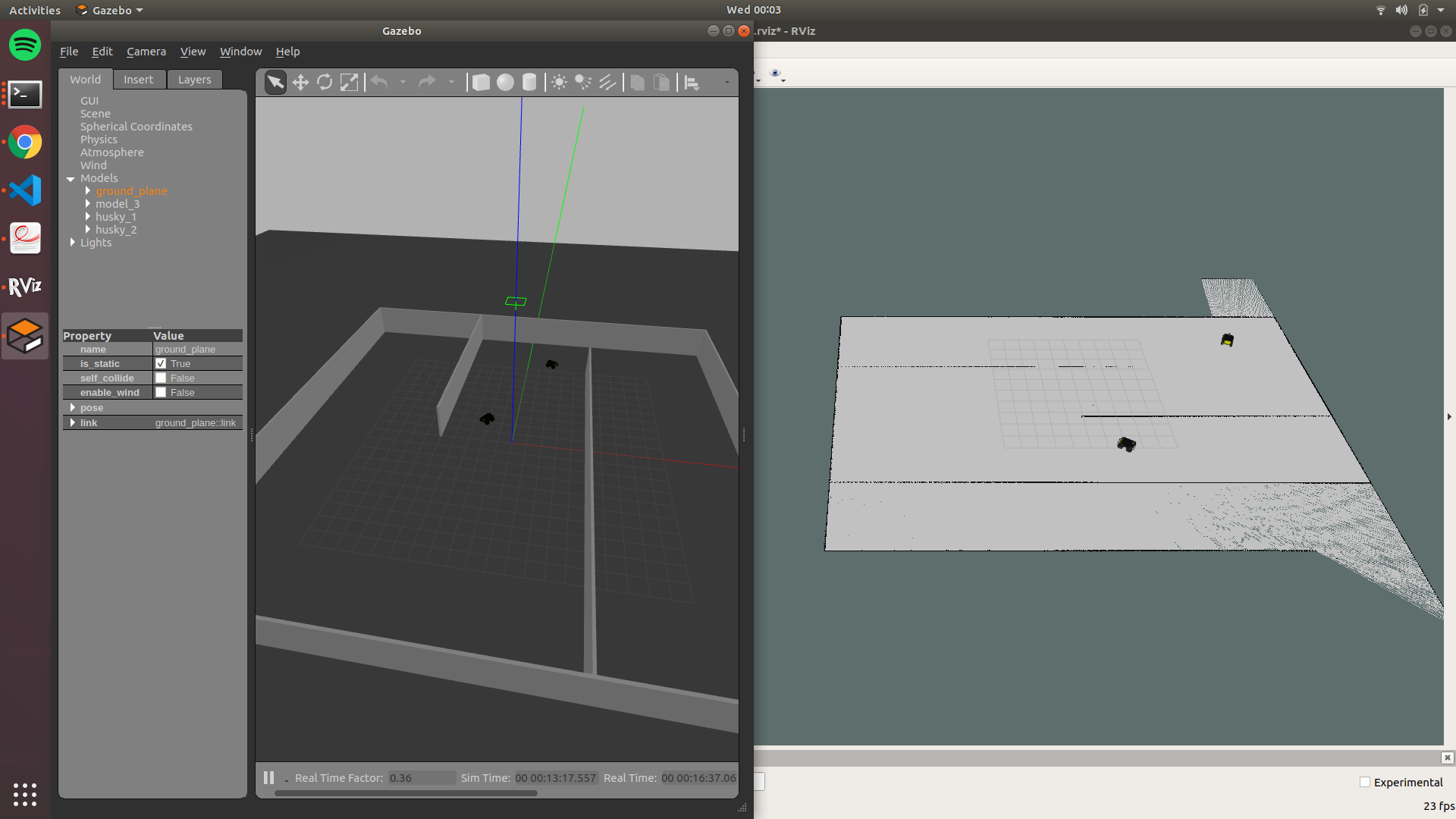
I am trying to map a Gazebo world (see image below) using two husky bots using the multirobot_map_package.
I have spawned two husky bots (namespaced husky_1 and husky_2) in the Gazebo world.
I using two ekf_localization nodes (husky_1/ekf_localization and husky_2/ekf_localization) to publish the husky_1/odom -> husky_1/base_link and husky_2/odom -> husky_2/base_link transforms.
I am using two move_base nodes (/husky_1/move_base and /husky_2/move_base). I have set static_map to false.
I am also using two slam_gmapping nodes (husky_1/slam_gmapping and husky_2/slam_gmapping) to achieve two things -
- publish
/map -> /husky_1/odomand/map -> /husky_2/odomtransforms - publish
/husky_1/mapand/husky_2/map(which is needed by themultirobot_map_package)
Here's the thing though -
- I have spawned
husky_1andhusky_2at(0,0,0)and(7,0,0)respectively. I assume these refer to the co- ordinates in theGazeboworld. We can see theirinitial posesin theGazeboworld in the image below.
- I am running two
exploration nodes(from the explore_lite package), namelyhusky_1/exploreandhusky_2/explore. This node performsfrontier_based explorationof the world. As the bots are exploring the world, I see a significant mismatch between their positions in theGazeboworld and that in/mapfixed frame inRviz. (See image below)
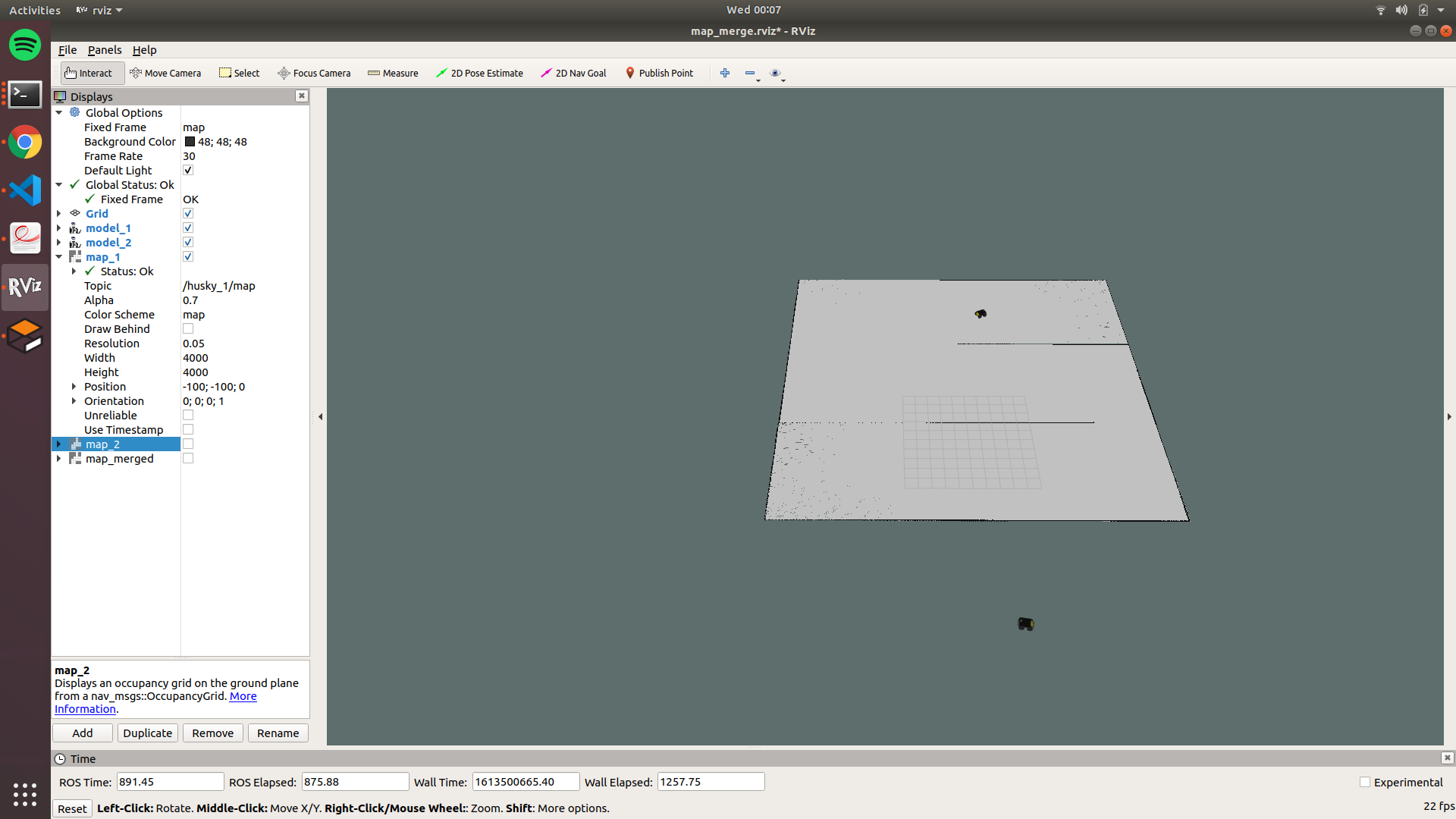
multirobot_map_packagetakes the map published in/husky_1/mapand/husky_2/mapand publishes themerged_mapat/merge_map/map. I have also set theknown_init_posestotrue. For each of the two bots, I set the values ofmap_merge/init_pose_x,pose_y,pose_z,pose_yawto the same values used while spawing the bots in theGazeboworld.
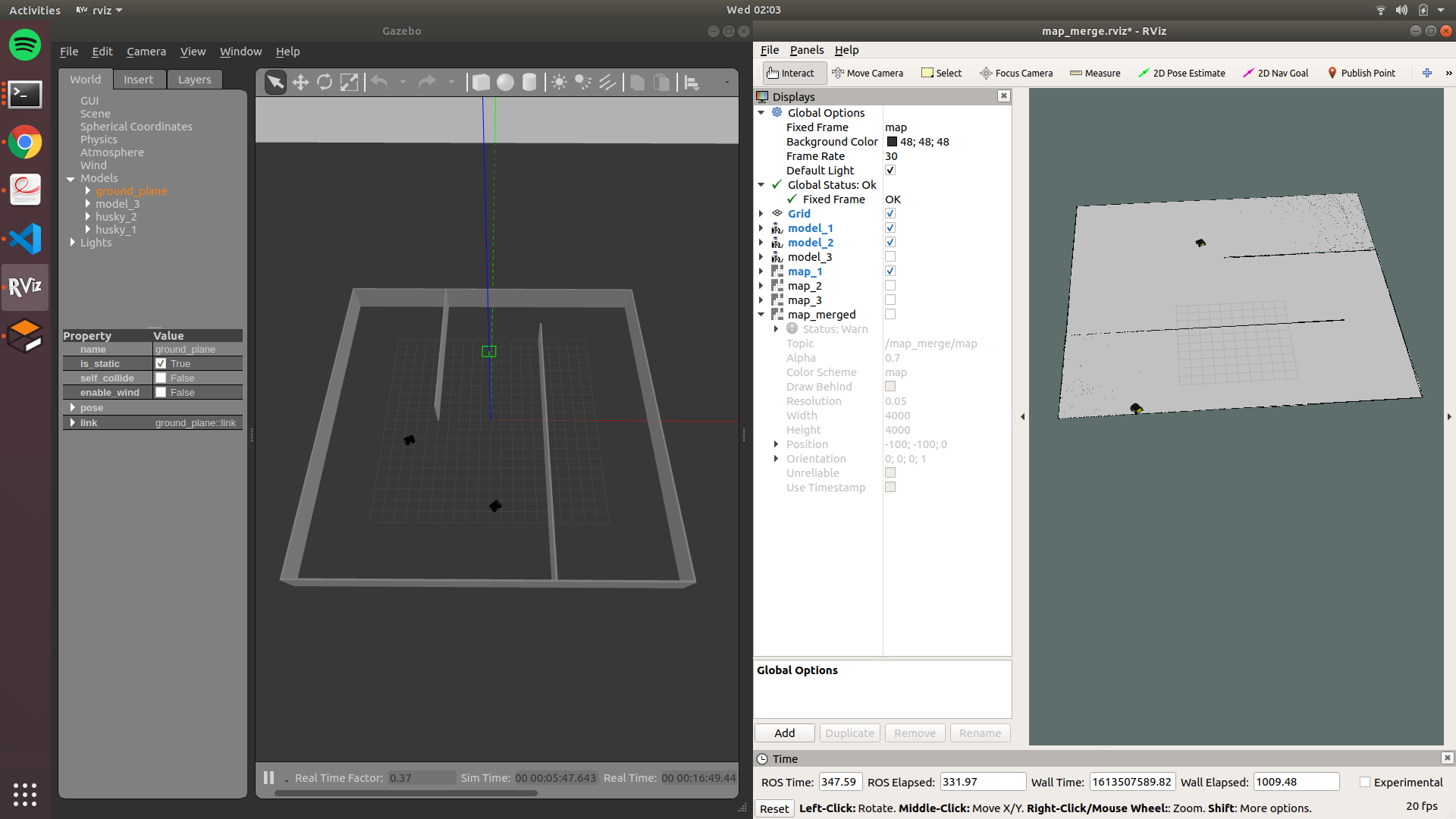
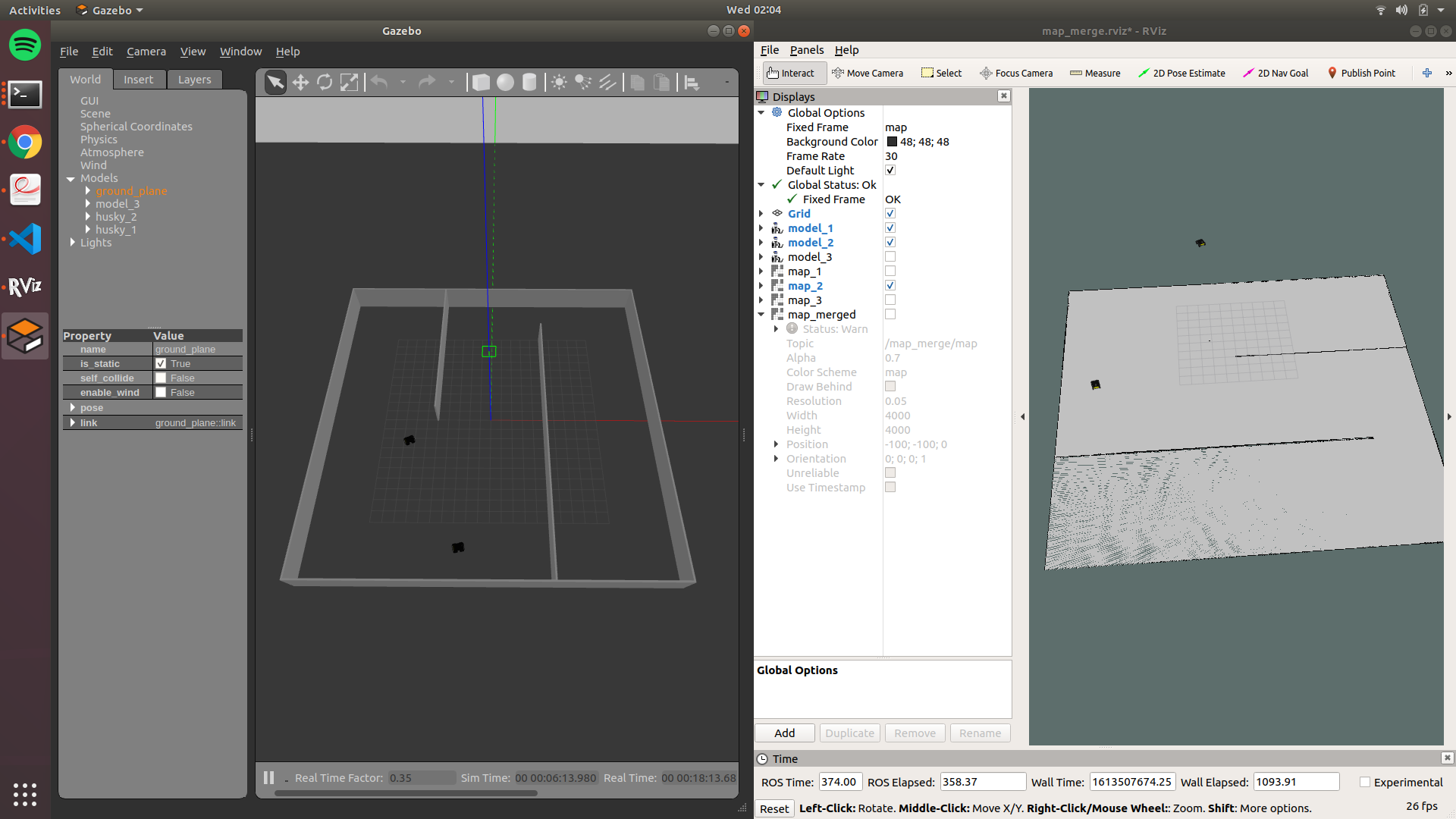
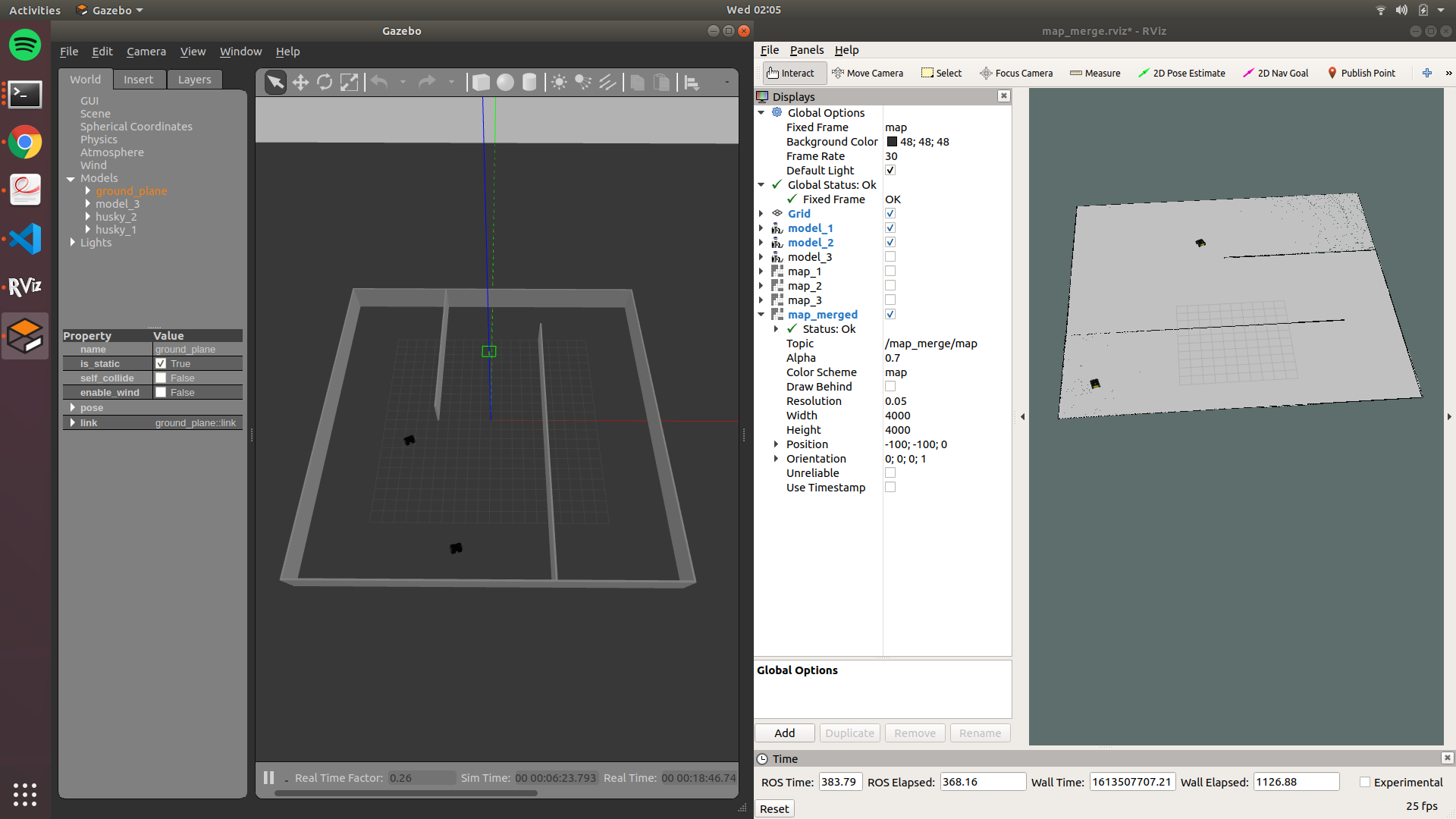
Even though the maps published at /husky_1/map and /husky_2/map (by husky_1/slam_gmapping and husky_2/slam_gmapping respectively) appear to be correct, the map published at /map_merge/map seems to be wrong. (See images for /husky_1/map , /husky_2/map and /map_merge/map below).


Why is this happening?
EDIT ONE -
On setting the known_init_poses paramtere to false for multirobot_map_package, I am able to produce the correct merged_map. However, the positions of the bots in the merged_map seem to be wrong. I am attaching the images in the Fixed frame /map of /husky_1/map, /husky_2/map and /map_merge/map respectively.