
Slam Toolbox - How is scan data used to build the map?
Hello together,
I set up a simulation environment with Slam Toolbox and navigation2. This all works fine so far, however I am now wondering about how the map is actually being created.
I recognized, that areas where no object gets hit stay unknown (-1) in the occupancy grid map. Whereas the area between min_range and max_range should be updated as free (0). The simulated laser is providing 360° readings. Beams that hit no object return a range value of infinity and an intensity of zero. Beams that hit an object return the range and an intensity of 400.
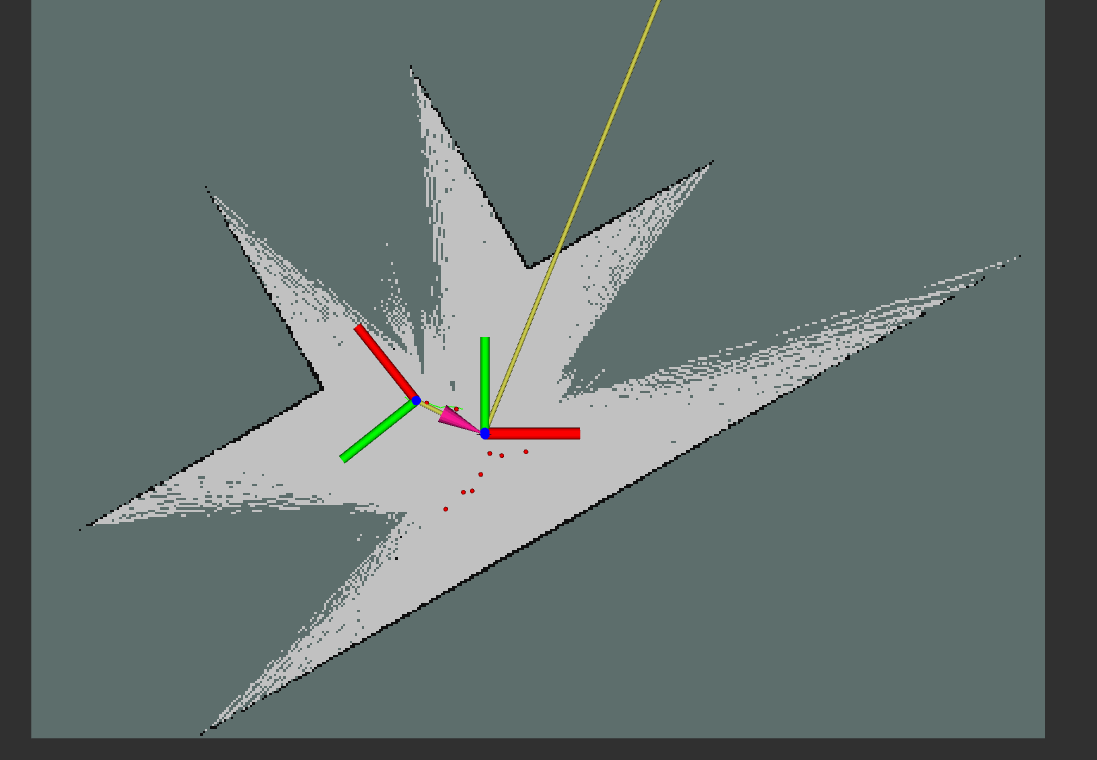
This leads to the following map depicted in the picture. A corridor leads to triangles of unknown area. Is this expected behavior? If yes, why? And if not, what could cause this?
Thanks!
add a comment
