
has anyone used two lidars in the same plane?
I have two robots and the lidars show strange behaviors when working both robots together. The lidars detect unexisting objects in their proximities showing them in the costmaps. I tried modifying the height of the lidars by one centimeter but I guess it's not enough.
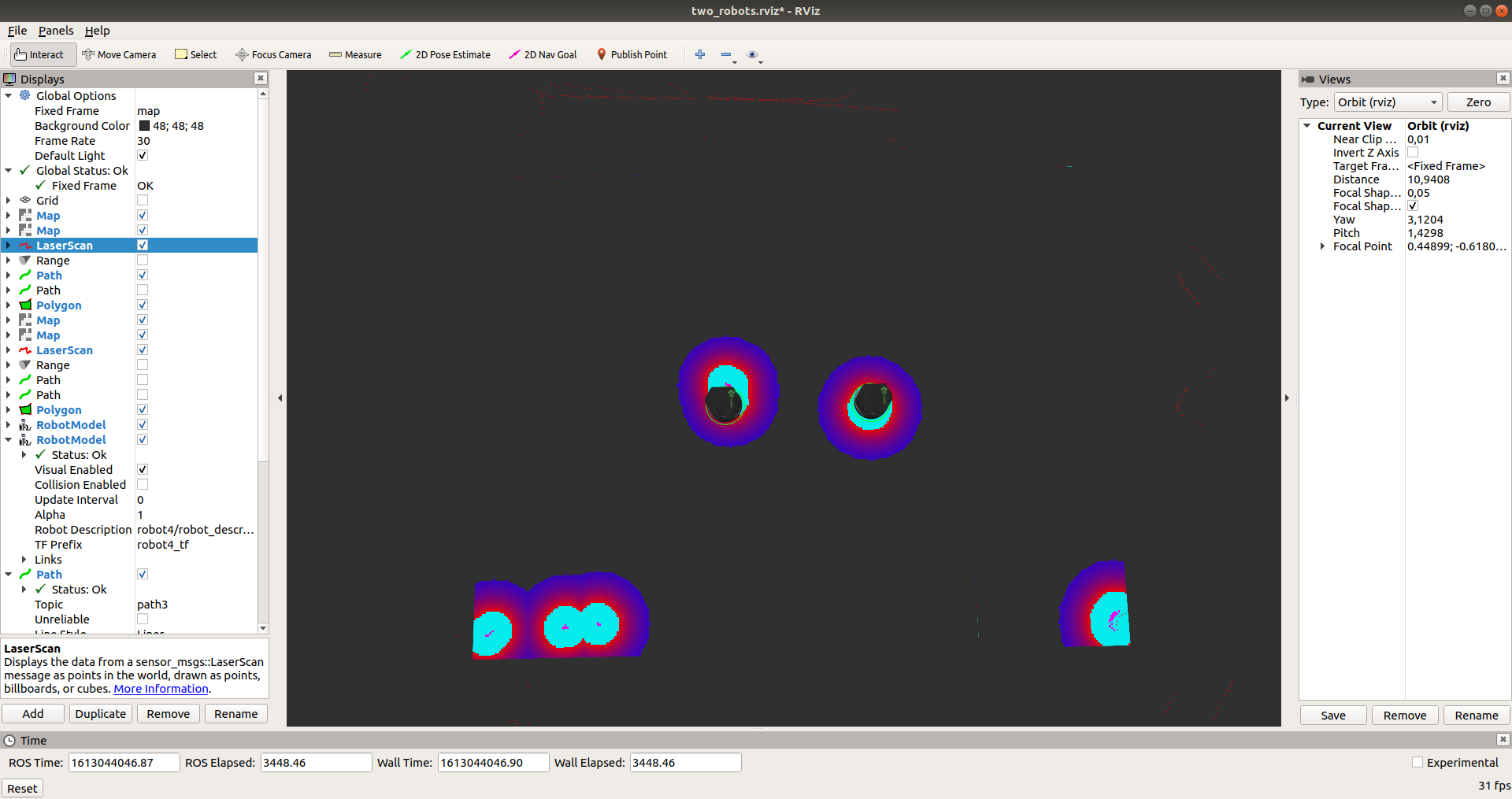
In the first image I had the two robots one next to the other. So far, everything looks normal as each robot is detecting the other one. I will call the robot in the left robot1 and the robot in the right robot2.
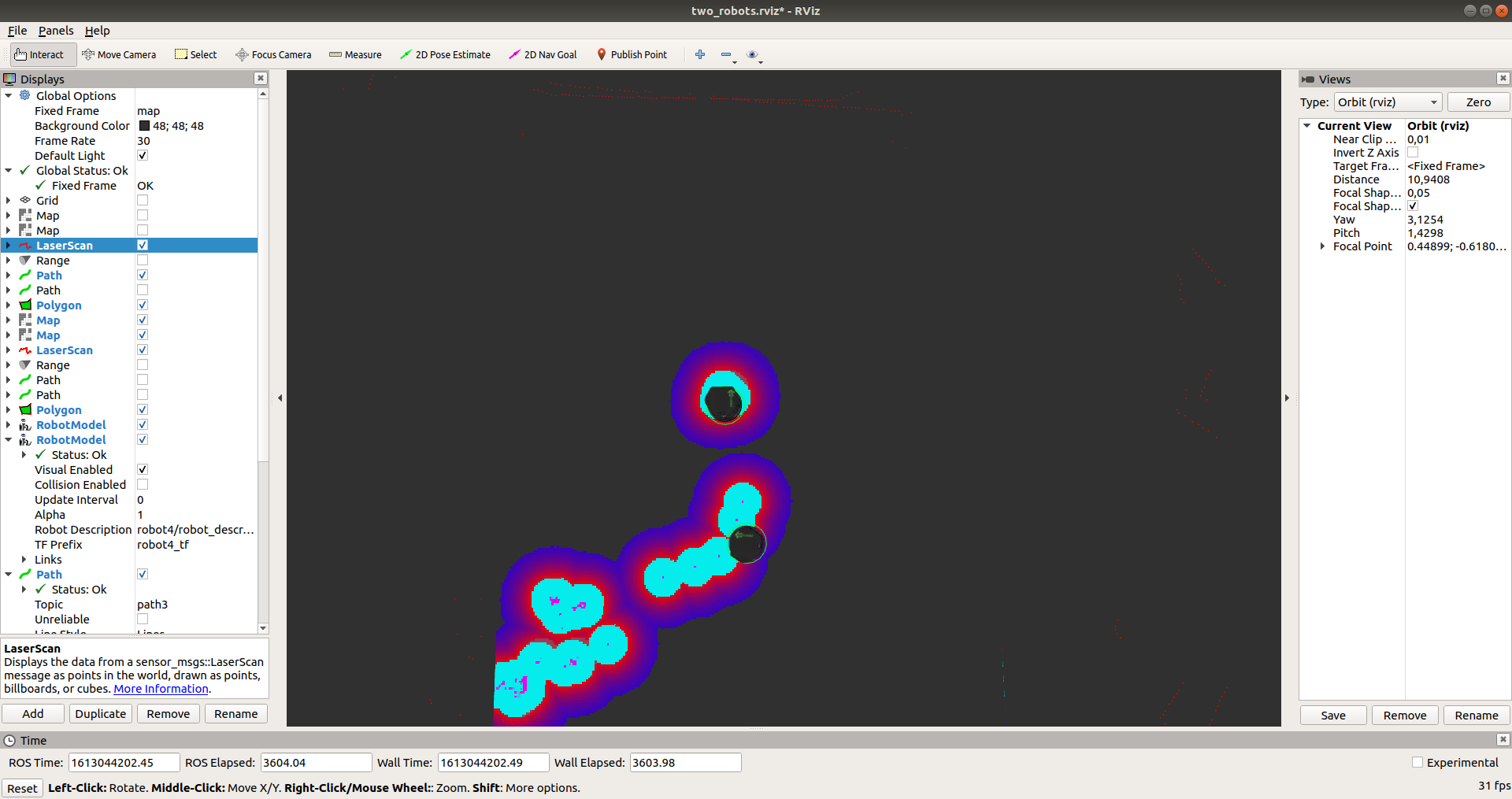
Then I moved the robot2 down and left. This leads to the the second image, where only the costmap of the robot2 is plotted. As you can see, the robot2 in the lower side has inveted unexisting point obstacles in its proximities.
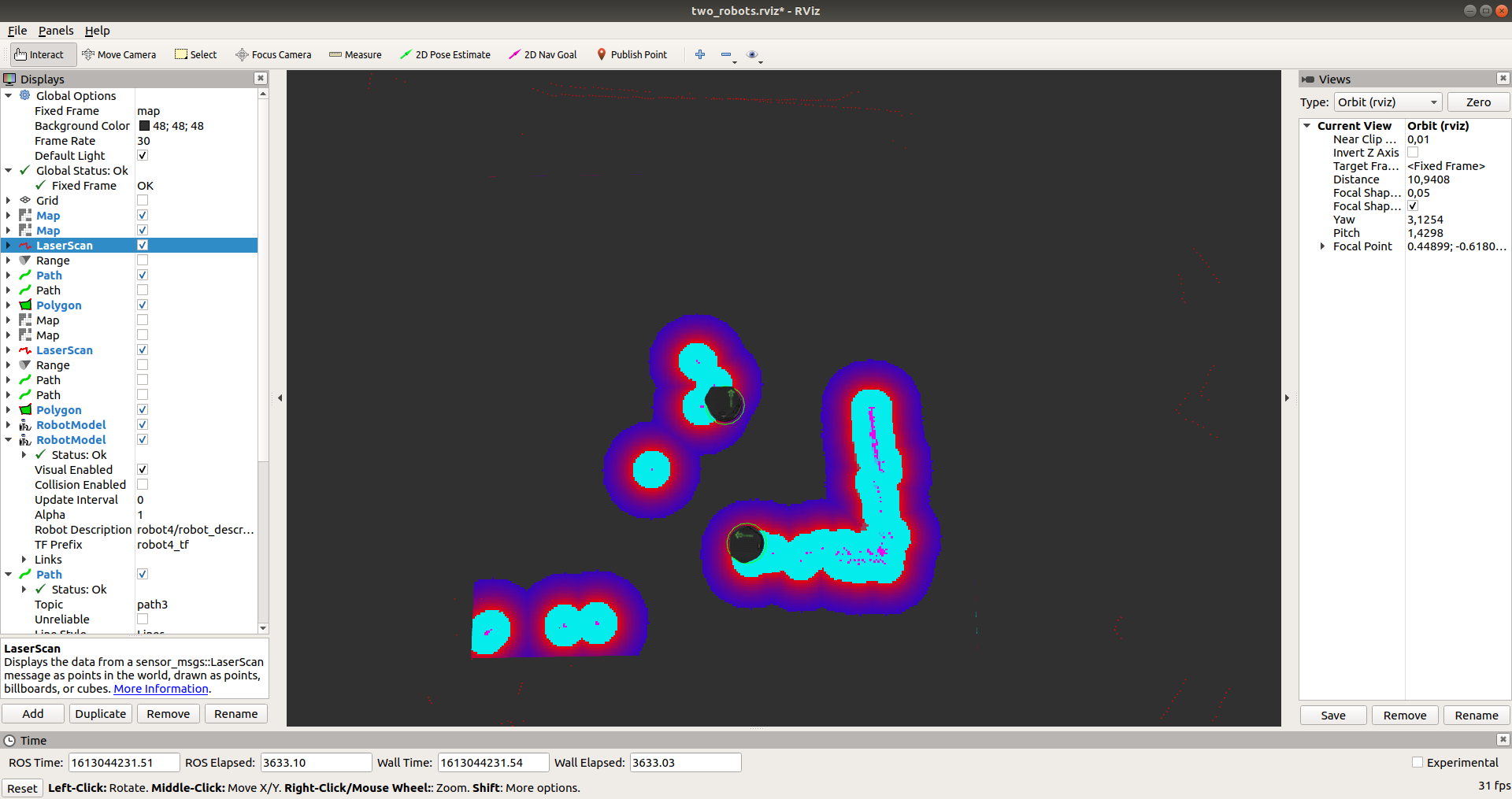
In the third image, we can see the same situation but only the map of robot1 is plotted. Here you can see the path that robot2 followed from the position of image1 to the one in images 2 and 3. Again you can see how robot one has detected some unexisting point obstacles next to its base.

There are total of two lidars or two lidars on each bot?
There are two robots and each one has one lidar.
Is everything working fine if you are just using one robot with its one lidar?
yes, that's why it's so strange to me
Is there an option to limit the maximum range of the lidar? If yes, can you try reducing it?
I have used many lidars (several robots, each with two lidars) in the same plane with no issue, but they were Hokuyo UST-20LXes--not YDLIDARs. It's possible yours are interfering with each other, but it's also possible there's something else happening. What are the environment and robots like, e.g., are there reflective surfaces? Can you please post pictures of the strange behavior, so we can compare what you expect to see with what actually happens?
sure, tomorrow I will do the screenshots as today I'm not in the workshop.
I finally could do some more tests and I'm trying to give some details of what's happening using rviz scrrenshots. I hope you can have a clearer idea now.