
CHOMP Planner freezes moveit Motionplanning
Hi all,
I am trying to use the CHOMP planner for my custom robot by following the tutorial.
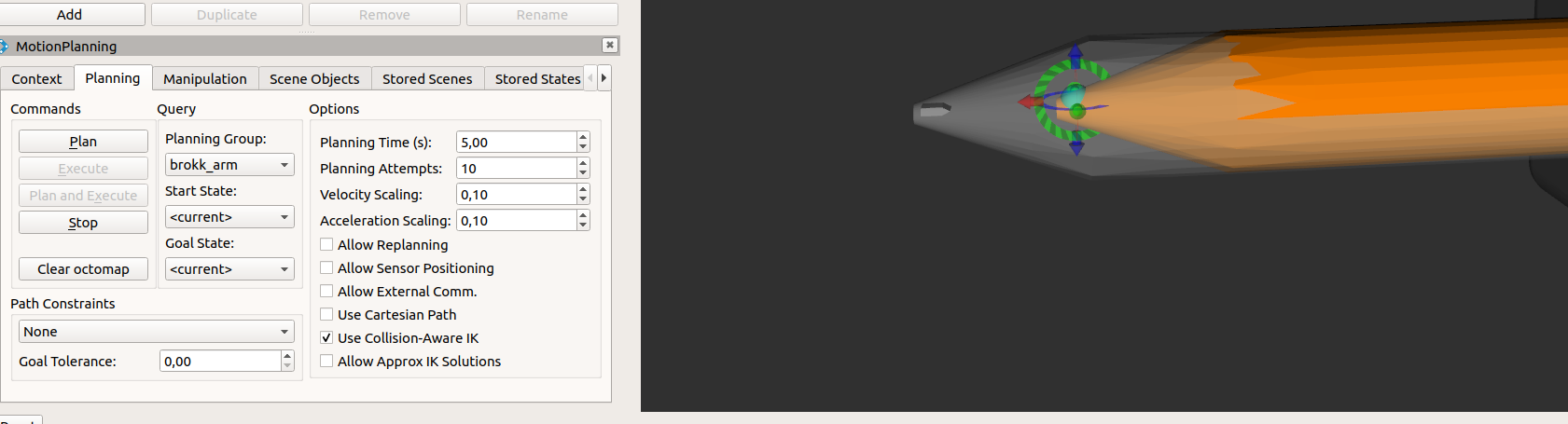
After setting everything up as shown in the tutorial, I tried to plan a very simple movement. As one can see in the below screenshot, the planner is "planning" (I assume that it is planning since the Plan and Execute button is not clickable anymore). However it is not giving any output back. On the right side, you can also see that I have moved the interactive marker just very slightly, but the planner still doesn't make it happen.
[ INFO] [1610835807.249180611]: MoveGroup context using planning plugin chomp_interface/CHOMPPlanner
[ INFO] [1610835807.249199772]: MoveGroup context initialization complete
You can start planning now!
[ WARN] [1610835807.338433399]: IK plugin for group 'my_arm' relies on deprecated API. Please implement initialize(RobotModel, ...).
[ INFO] [1610835807.339821286]: IK Using joint my_base -3.14159 3.14159
[ INFO] [1610835807.339840764]: IK Using joint my_body1 -3.14159 3.14159
[ INFO] [1610835807.339855676]: IK Using joint my_body2 -3.14159 3.14159
[ INFO] [1610835807.339867021]: IK Using joint my_body3 -3.14159 3.14159
[ INFO] [1610835807.339878619]: IK Using joint my_body4 -3.14159 3.14159
[ INFO] [1610835807.339889941]: IK Using joint my_tip -3.14159 3.14159
[ INFO] [1610835807.339923501]: Looking in common namespaces for param name: my_arm/position_only_ik
[ INFO] [1610835807.340579340]: Looking in common namespaces for param name: my_arm/solve_type
[ INFO] [1610835807.341201626]: Using solve type Speed
[ INFO] [1610835807.942195559]: Starting planning scene monitor
[ INFO] [1610835807.946225213]: Listening to '/move_group/monitored_planning_scene'
QObject::connect: Cannot queue arguments of type 'QVector<int>'
(Make sure 'QVector<int>' is registered using qRegisterMetaType().)
QObject::connect: Cannot queue arguments of type 'QVector<int>'
(Make sure 'QVector<int>' is registered using qRegisterMetaType().)
[ INFO] [1610835808.216240325]: Constructing new MoveGroup connection for group 'my_arm' in namespace ''
[ INFO] [1610835809.328760959]: Ready to take commands for planning group my_arm.
[ INFO] [1610835809.328864724]: Looking around: no
[ INFO] [1610835809.328933427]: Replanning: no
[ INFO] [1610836013.834534655]: Combined planning and execution request received for MoveGroup action. Forwarding to planning and execution pipeline.
[ INFO] [1610836013.834957349]: Planning attempt 1 of at most 1
add a comment
