
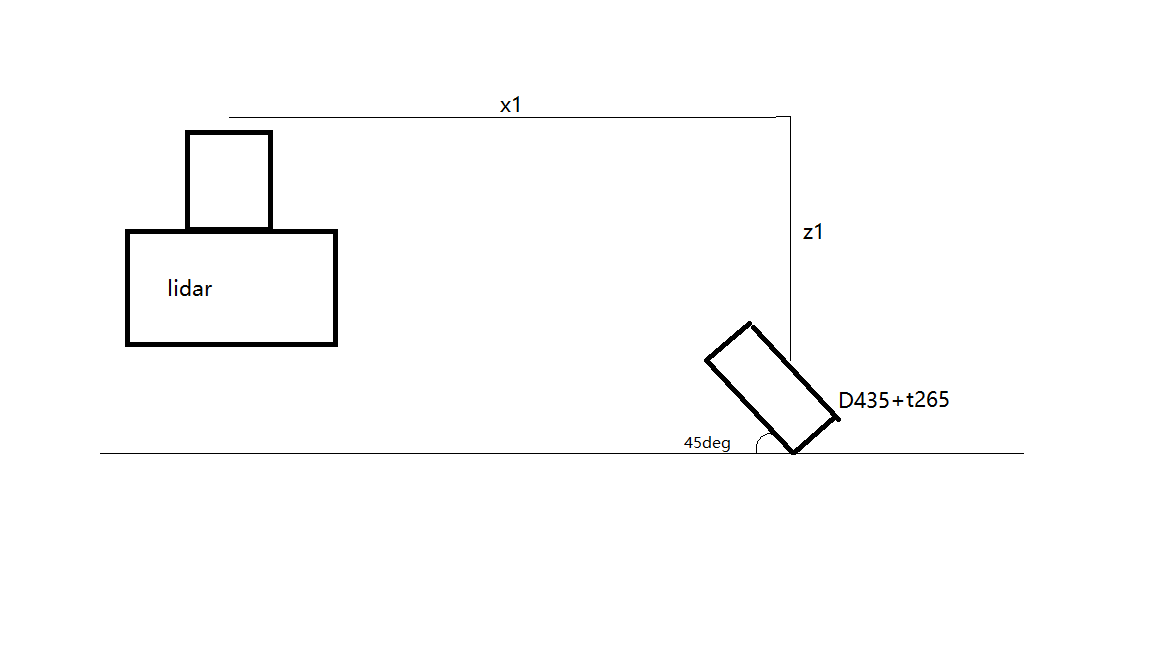
RTABMap: TF setting between lidar and the tilt D435+T265
The sensors driver launch file is: roslaunch realsense2_camera rs_d400_and_t265.launch
The tutorials page is :http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping
My question is : In order to run the following command:
roslaunch rtabmap_ros rtabmap.launch args:="-d --Mem/UseOdomGravity true --Optimizer/GravitySigma 0.3" odom_topic:=/t265/odom/sample frame_id:=t265_link rgbd_sync:=true depth_topic:=/d400/aligned_depth_to_color/image_raw rgb_topic:=/d400/color/image_raw camera_info_topic:=/d400/color/camera_info approx_rgbd_sync:=false visual_odometry:=false
How to set the TF between the lidar and the t265_link Any ideas? Thanks.

{kind=link}
crossref: https://github.com/introlab/rtabmap_r...