
Can't send goal to move_base
Hello,
I'm using move_base to drive a robot but i'm facing a problem that the move_base/current_goal does not the same as which i send to it
Each time i run the move_base_client node it will result in a different goal but none of them is the same as the goal i want to publish
This is the code i use to publish the goal
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main(int argc, char** argv){
ros::init(argc, argv, "simple_navigation_goals");
//tell the action client that we want to spin a thread by default
MoveBaseClient ac("move_base", true);
//wait for the action server to come up
while(!ac.waitForServer(ros::Duration(5.0))){
ROS_INFO("Waiting for the move_base action server to come up");
ROS_INFO("HIEP");
}
ROS_INFO("Connected");
move_base_msgs::MoveBaseGoal goal;
//we'll send a goal to the robot to move 1 meter forward
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = 1.0;
goal.target_pose.pose.position.y = 1.0;
goal.target_pose.pose.position.z = 0.0;
goal.target_pose.pose.orientation.x = 0.0;
goal.target_pose.pose.orientation.y = 0.0;
goal.target_pose.pose.orientation.z = 0.0;
goal.target_pose.pose.orientation.w = 1.0;
ROS_INFO("Sending goal");
ac.sendGoal(goal);
ac.waitForResult();
if(ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("Hooray, the base moved 1 meter forward");
else
ROS_INFO("The base failed to move forward 1 meter for some reason");
return 0;
}
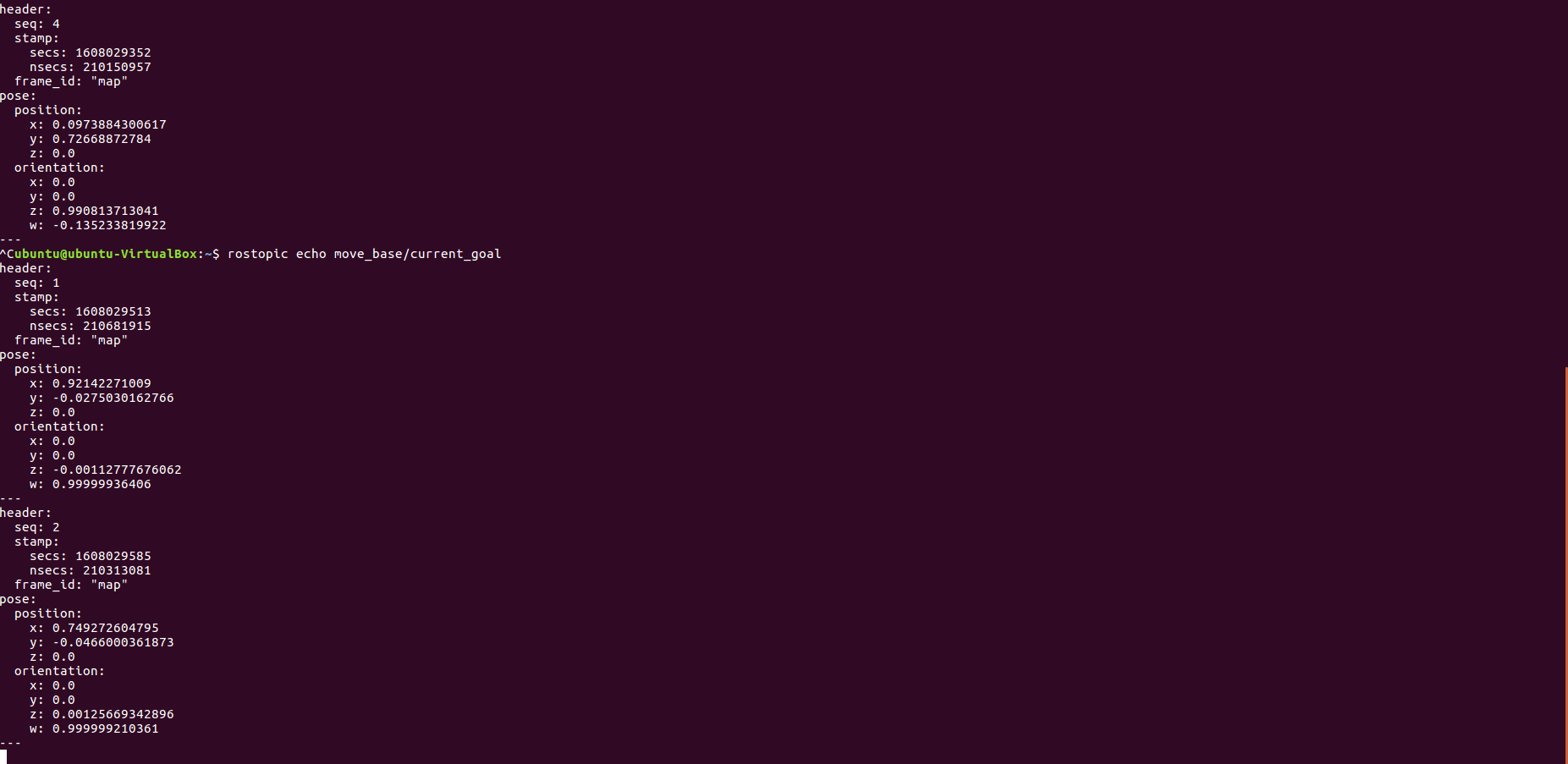
And this is the result when i echo to move_base/current_goal topic
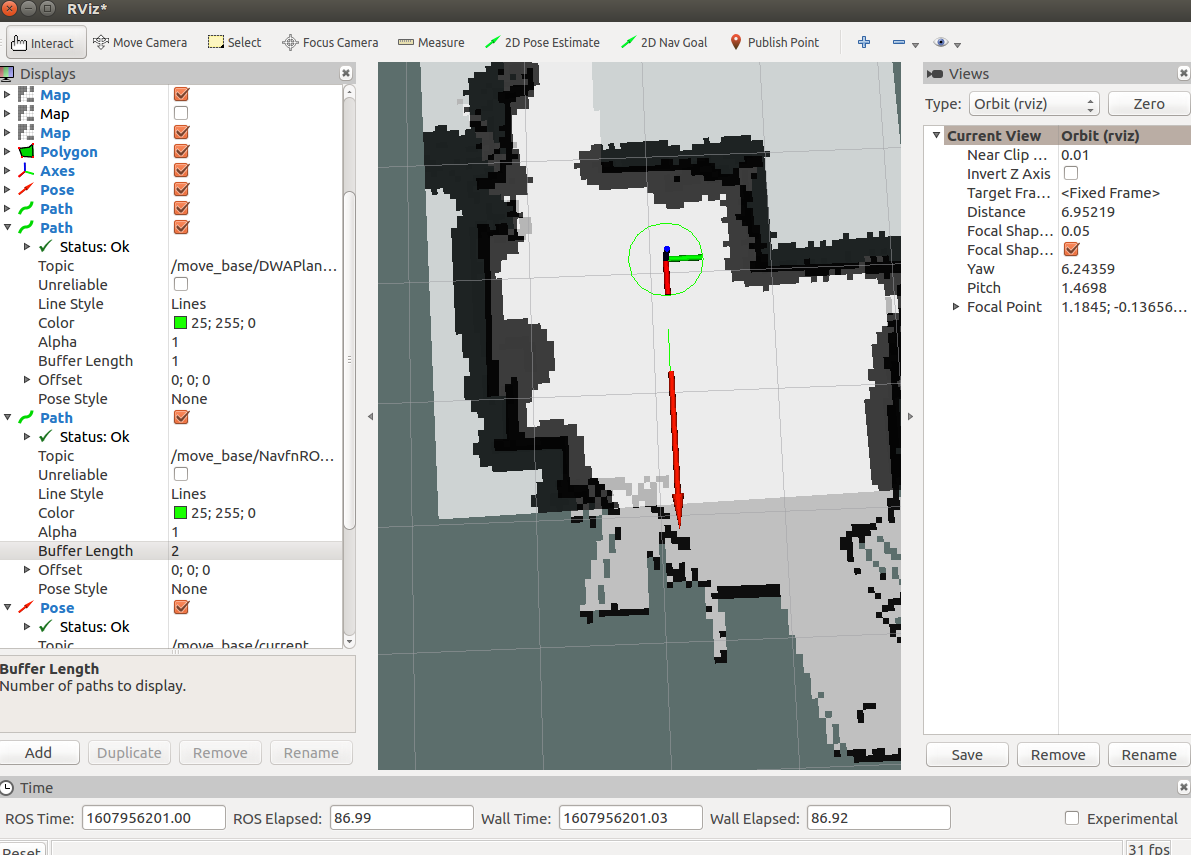
And my rviz screen :
 This is my move_base parameter :
This is my move_base parameter :
# Move base node parameters. For full documentation of the parameters in this file, please see
#
# http://www.ros.org/wiki/move_base
#
shutdown_costmaps: false
controller_frequency: 5.0
controller_patience: 3.0
planner_frequency: 1.0
planner_patience: 5.0
oscillation_timeout: 10.0
oscillation_distance: 0.2
# local planner - default is trajectory rollout
base_local_planner: "dwa_local_planner/DWAPlannerROS"
base_global_planner: "navfn/NavfnROS" #alternatives: global_planner/GlobalPlanner, carrot_planner/CarrotPlanner
#We plan to integrate recovery behaviors for turtlebot but currently those belong to gopher and still have to be adapted.
## recovery behaviors; we avoid spinning, but we need a fall-back replanning
#recovery_behavior_enabled: true
#recovery_behaviors:
#- name: 'super_conservative_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'conservative_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'clearing_rotation1'
#type: 'rotate_recovery/RotateRecovery'
#- name: 'super_conservative_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'conservative_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'clearing_rotation2'
#type: 'rotate_recovery/RotateRecovery'
#super_conservative_reset1:
#reset_distance: 3.0
#conservative_reset1:
#reset_distance: 1.5
#aggressive_reset1:
#reset_distance: 0.0
#super_conservative_reset2:
#reset_distance: 3.0
#conservative_reset2:
#reset_distance: 1.5
#aggressive_reset2:
#reset_distance: 0.0
Anyone know what wrong with my code and how to fix it @@!
I appreciate any help :3
Tell me if u need more information


@hiep127 for any text please don't use images as the text in images can't be copy and pasted. Please see the support page