
[ROS2] Global planner create a path pass through obstacle

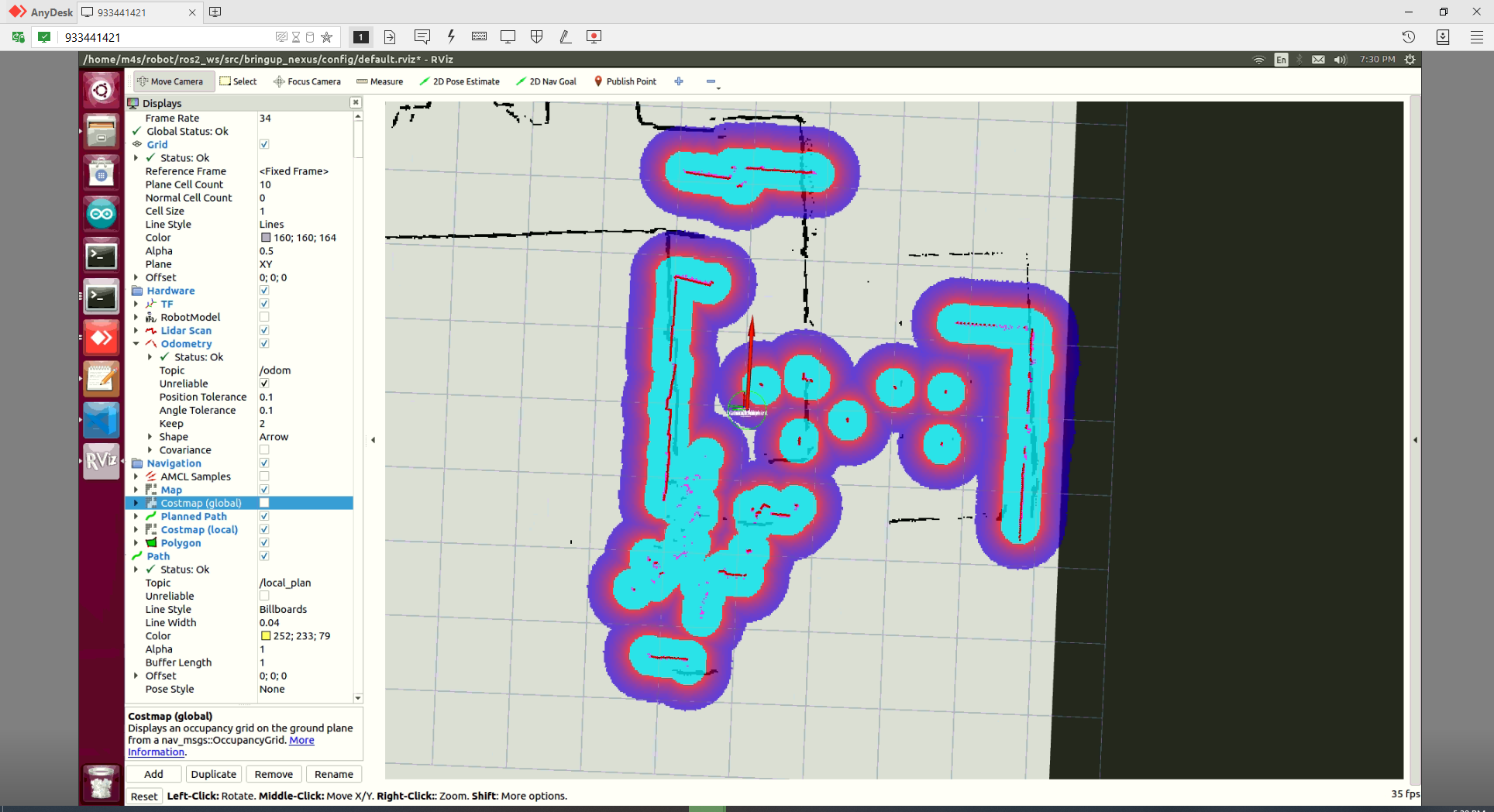
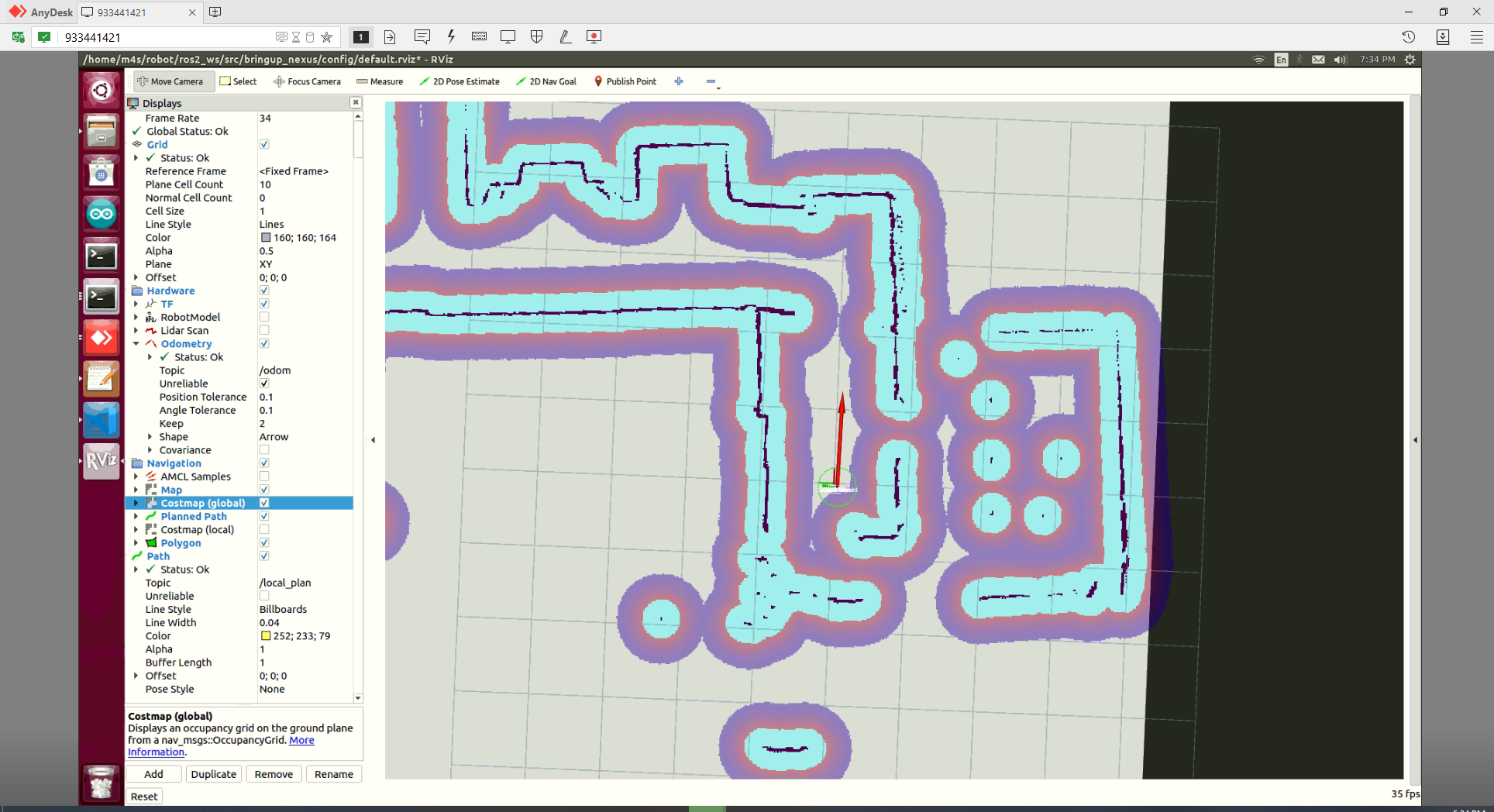
Hi everyone, I'm using navigation2 on ROS2 (Dashing) and I have a problem about the global planner, when I placed an object in front of my mobile robot, it generated a path which pass through obstacle. Eventually, it crashed the obstacle.
Here is my local cosstmap
And this is my global costmap
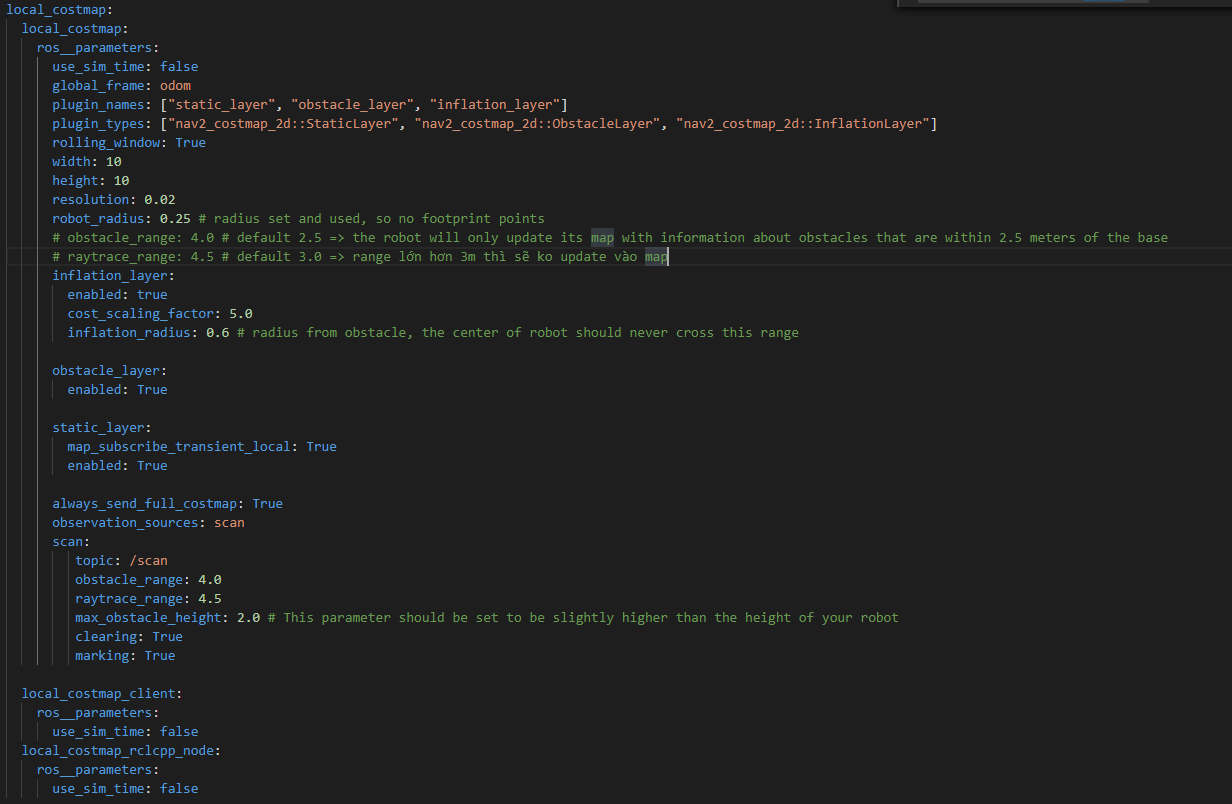
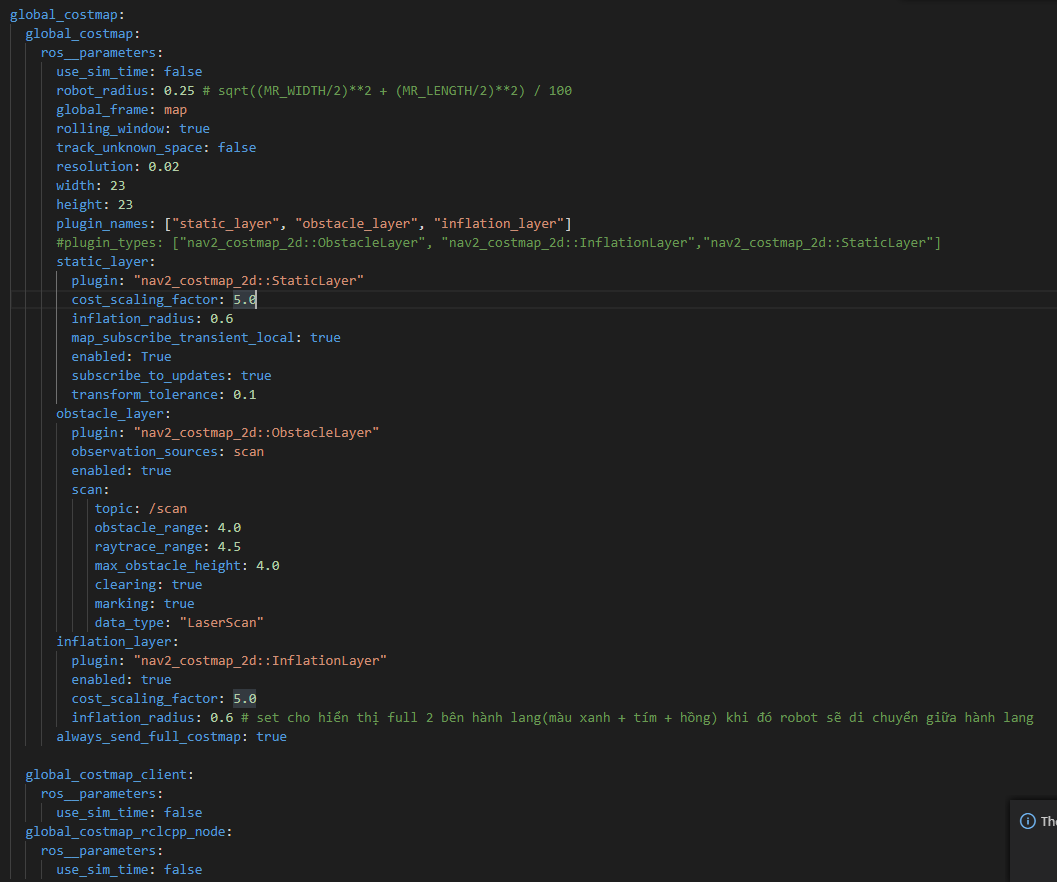
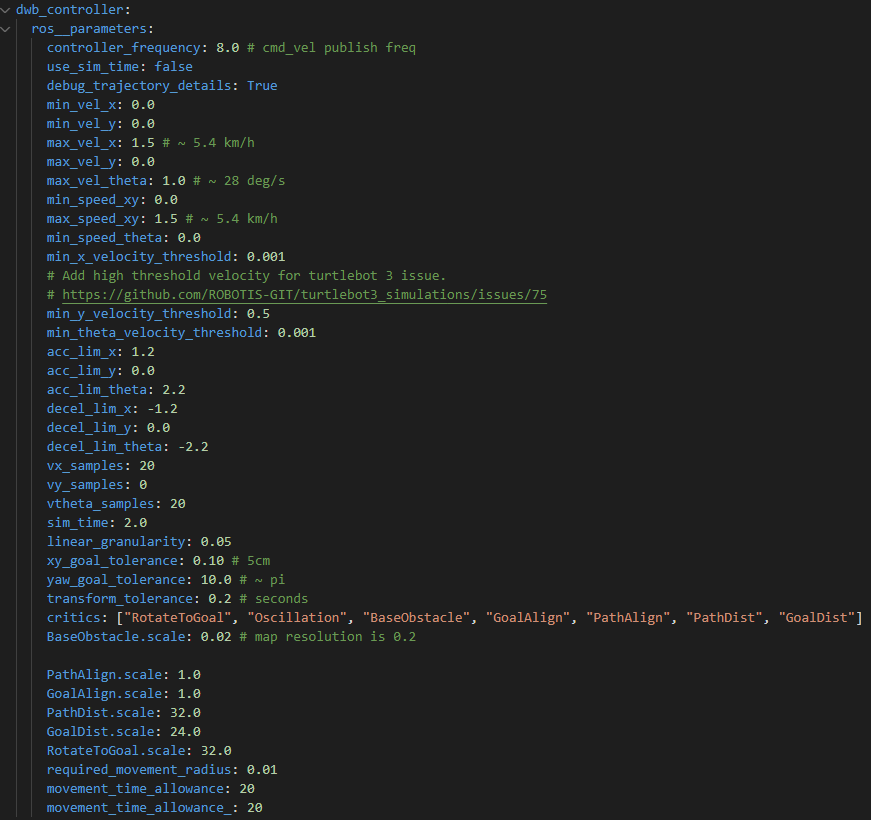
And here is my config for local and global and dwb controller
Sorry, I dont know how to add yaml format to here
add a comment
